PAL Robotics Kangaroo
Last edited
Fact-checked
In review queue
Sources
24 citations
Revision
v6 · 4,027 words
Fact-checks are independent of edits: a reviewer re-verifies the article against its sources and stamps the date. How we verify
| PAL Robotics Kangaroo | |
|---|---|
 | |
| General information | |
| Manufacturer | PAL Robotics |
| Country of origin | Spain |
| Year introduced | 2021 (prototype); 2024 (commercial) |
| Status | Commercially available |
| Type | Bipedal humanoid robot |
| Height | 160 cm |
| Weight | 35 to 40 kg |
| Degrees of freedom | 28 (full body) |
| Predecessor | TALOS |
| Website | pal-robotics.com/robot/kangaroo |
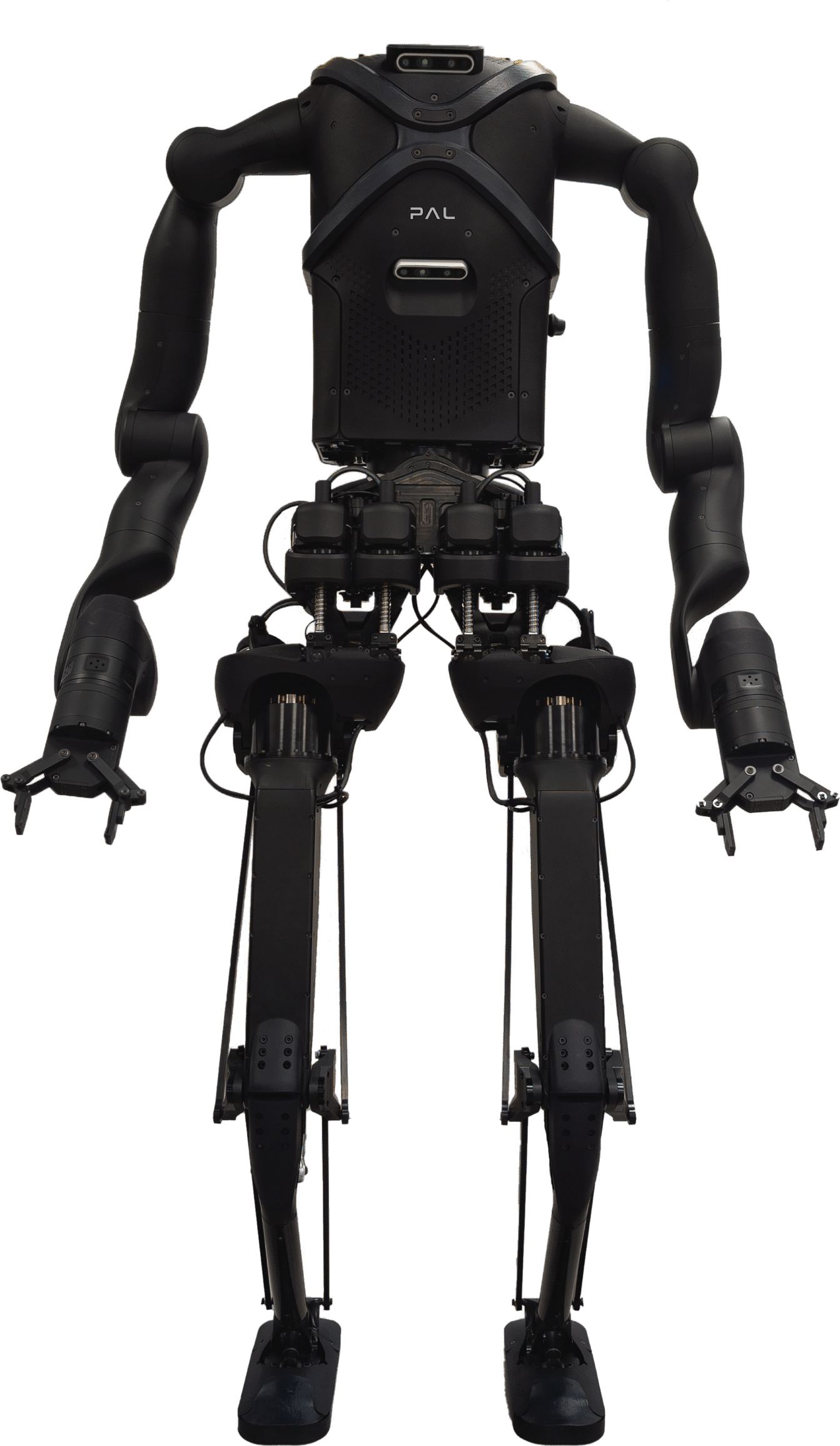
The PAL Robotics Kangaroo is a full-size bipedal humanoid robot built by PAL Robotics, a Barcelona, Spain robotics company, as a research platform for dynamic bipedal locomotion. It stands 160 cm (5 ft 3 in) tall, weighs 35 to 40 kg depending on the variant, has 28 degrees of freedom, and is driven by custom force-controlled linear ball-screw actuators arranged in a novel serial-parallel hybrid kinematic chain that places all leg motors near the pelvis to minimize leg inertia.[1][2] Introduced as a prototype in 2021 and made commercially available in 2024, Kangaroo is designed for highly dynamic motions such as jumping, squatting, and running, trading the payload and industrial strength of its predecessor TALOS for lightweight construction, low inertia, and agility.[1][2][3]
The lower-body design has been modeled and analyzed in a peer-reviewed study published in the journal Robotics and Autonomous Systems (2024), authored by PAL Robotics engineers in collaboration with researchers affiliated with the French national research organization CNRS, Inria, and LORIA (Universite de Lorraine).[12] The platform runs on Ubuntu Linux with ROS 2 (Robot Operating System) as its middleware and uses a 2 kHz EtherCAT control network for real-time responsiveness. The first commercial unit was delivered to the Technical University of Vienna (TU Wien) in mid-2024, and the robot has since been deployed in the European Union's Horizon Europe PRIMI project for neuromorphic robotics and stroke rehabilitation research.[3][4]
PAL Robotics markets the platform with the tagline "Leap into the future of dynamic bipedal robotics," describing a robot with "low moving inertia in the legs and suitable for highly dynamic motions."[1]
What is the Kangaroo robot?
Kangaroo is a development-ready bipedal humanoid research robot. Unlike commercial humanoids aimed at factory or logistics deployment, it is sold primarily to universities and research labs as an open, ROS 2-based platform for studying locomotion, reinforcement learning, and embodied AI. Its defining feature is a leg architecture that uses linear actuators connected through closed (serial-parallel hybrid) kinematic chains rather than the conventional rotary joints found in most humanoids, an approach intended to deliver low inertia, impact resilience, and energy-efficient dynamic gaits.[1][2][12]
The headless robot can walk freely, absorb impacts, and perform rapid legged movements because its motors are concentrated in the torso, which PAL Robotics describes as a "mechanical core," giving the machine a low, balanced center of gravity.[2][3]
Who makes the Kangaroo?
PAL Robotics
PAL Robotics was founded in 2004 in Barcelona, Spain, by Francesco Ferro and a small team of engineers who set out to build the first fully autonomous humanoid biped robot in Europe.[5] Over the next two decades, the company developed a succession of humanoid and service robots that established its reputation in the European robotics ecosystem.
The company's robot lineage began with REEM-A in 2005, a humanoid capable of walking, playing chess, and recognizing faces and voice commands by 2006. REEM-B followed in 2008 with improved performance, and REEM-H1 in 2010 marked the company's first robot intended as a commercial service platform. The full-size REEM debuted in 2012 for entertainment and service applications, and REEM-C arrived in 2013 as an advanced research humanoid with improved mobility and interaction capabilities.[5]
In 2017, PAL Robotics launched TALOS, a high-performance humanoid designed for industrial research applications such as drilling and riveting. TALOS represented the state of the art in PAL's humanoid design at the time, with 32 degrees of freedom, torque-controlled joints, and a 6 kg payload per arm. However, at 175 cm tall and 95 kg, TALOS was heavy and relatively slow, walking at a maximum of 3 km/h.[6][7]
Beyond humanoids, PAL Robotics expanded into mobile manipulation with TIAGo (2015) and TIAGo++ (2019), and into social robotics with ARI (2019). The company has participated in over 60 European Union research projects and has been financially self-sufficient since 2016, funding operations through product sales rather than venture capital.[5][8]
PAL Robotics forms part of the PAL Technology Group, which is connected to the Royal Group, a diversified conglomerate based in Abu Dhabi, United Arab Emirates, comprising over 60 companies across real estate, hospitality, healthcare, and technology sectors. This relationship dates back to at least 2011, when PAL Robotics received a bulk order of 20 REEM robots from the Abu Dhabi National Exhibition Center (ADNEC), which led to plans for a robot manufacturing facility in the emirate.[9][10]
The CNRS collaboration
Kangaroo's mechanical and control research has been developed in collaboration with French robotics laboratories. The foundational lower-body modeling paper, "Modeling and Numerical Analysis of Kangaroo Lower Body based on Constrained Dynamics of Hybrid Serial-Parallel Floating-Base Systems," was led by Enrico Mingo Hoffman (affiliated with Universite de Lorraine, CNRS, Inria, and LORIA) together with PAL Robotics engineers Andrea Curti, Narcis Miguel, Sai Kishor Kothakota, Alberto Molina, Adria Roig, and Luca Marchionni, and was published in Robotics and Autonomous Systems in 2024.[12] PAL Robotics has a long history of working with CNRS laboratories: its earlier TALOS humanoid was co-developed with the LAAS-CNRS laboratory in Toulouse, and lessons from TALOS deployments at LAAS-CNRS and the University of Edinburgh directly shaped Kangaroo's design priorities around impact resilience and dynamic motion.[6][11]
Why was Kangaroo created?
While TALOS proved successful as a torque-controlled research platform at institutions like LAAS-CNRS and the University of Edinburgh, its weight and conventional rotary-joint design limited its ability to perform truly dynamic motions. PAL Robotics conceived Kangaroo to address these constraints, creating a humanoid optimized for agile bipedal locomotion, jumping, and running rather than heavy manipulation. The design philosophy prioritized low moving inertia, impact resilience, and energy efficiency, resulting in a robot that weighs less than half of TALOS while achieving significantly more dynamic movement capabilities.[2][11]
How is the Kangaroo designed?
Mechanical architecture
Kangaroo employs a novel mechanical design that differs fundamentally from PAL Robotics' prior bipedal platforms. Instead of conventional rotary actuators at each joint (as used in REEM-C and TALOS), Kangaroo uses custom linear ball-screw actuators arranged in a serial-parallel hybrid kinematic chain. According to the peer-reviewed lower-body study, "the mechanical design of the Kangaroo's anthropomorphic legs is based on novel high-power and robust linear actuation units located near the pelvis area with the actuation transferred to joints through a complex system of serial-parallel hybrid chains."[12] This architecture enables all leg actuators to be positioned near the pelvis, close to the robot's center of mass, rather than distributed along the limbs. The result is dramatically reduced leg inertia and improved mass distribution, both critical for dynamic locomotion.[12][13]
Each leg contains 6 actuated degrees of freedom and weighs approximately 12.5 kg. The kinematic structure of each leg comprises four closed sub-mechanisms: a 1-DOF hip yaw, a 2-DOF hip pitch/roll, a 1-DOF knee, and a 2-DOF ankle pitch/roll. When accounting for the passive joints in the closed linkages, the full lower-body model contains 76 total degrees of freedom (12 actuated, 64 passive), though the system reduces to a 16-DOF equivalent model for control purposes.[12][13]
A key design feature is the decoupled leg-length actuator, which separates vertical extension from hip swing motions. This decoupling improves energy efficiency during locomotion and enables leg extension and contraction with a single motor, simplifying the mechanical structure compared to robots that require multiple actuators for similar motions.[2][11]
The torso design concentrates motors in the central body, described by PAL Robotics as a "mechanical core," providing a lower, more balanced center of gravity. Carbon-fiber tubes are used in the structural frame for lightweight rigidity and easier handling. A protective waist feature has been added for fall safety, and symmetric foot sole plates improve stability during ground contact.[3][14]
Actuators
Kangaroo is powered by 12 linear ball-screw actuator modules (6 per leg), each equipped with integrated force sensors for closed-loop force and torque control. The actuators are backdrivable, efficient, and produce high-quality force control, enabling researchers to experiment with different control algorithms.[12][15]
Stroke lengths vary by joint: the hip yaw actuators have a stroke of plus or minus 0.02 m, the hip roll/pitch actuators plus or minus 0.04 m, the knee has a stroke from 0 to 0.15 m, and the ankle roll/pitch actuators have a stroke of plus or minus 0.02 m. All linear actuators except those at the thighs are equipped with relative linear encoders; the thigh actuators use absolute linear encoders for measuring screw displacement.[12]
The actuator electronics were designed and manufactured entirely in-house by PAL Robotics, optimizing the torque control approach previously demonstrated in TALOS and making it more accessible for researchers. Each actuator features its own dedicated control board, adopting a decentralized motor control architecture that reduces internal cabling by 40% compared to centralized designs.[3][14]
Sensors
The sensor suite on Kangaroo includes:
- Four Intel RealSense D435i depth cameras for navigation and footstep planning, combining stereo depth sensing with onboard IMU capability[3]
- An Advanced Navigation Orientus IMU/AHRS operating at 1 kHz for real-time state estimation during dynamic movements[11]
- Integrated force sensors in all linear actuators for closed-loop torque control[12]
- Linear encoders (both relative and absolute) on actuator ball screws[12]
- Enhanced force sensor resolution compared to earlier prototypes[3]
The high-frequency IMU output and minimal latency of the Orientus sensor proved particularly important for real-time state estimation during running and jumping, allowing the robot to adapt to environmental changes without relying on external sensors such as cameras or LiDAR.[11]
Computing and software
Kangaroo is equipped with two onboard PCs: one dedicated to real-time control and one to perception processing, each an Intel Core i7 with 32 GB of RAM and a 1 TB SSD. An NVIDIA Jetson Orin AI kit (Orin NX on the Standard variant, Orin AGX on the Plus variant) is available for running neural networks or reinforcement learning frameworks on the robot.[3][1]
The software stack runs on Ubuntu Linux with ROS as the standard middleware, consistent with PAL Robotics' company-wide commitment to the Robot Operating System ecosystem. PAL Robotics has been a contributor to ROS 2 development, particularly to the ros2_control framework. The company's PAL OS platform provides documentation, simulation models, and development tools for researchers working with Kangaroo, and the robot ships with support for the Isaac Lab, MuJoCo, and Gazebo simulators.[16][1]
The control system operates over a 2 kHz EtherCAT network, with capability for up to 5 kHz control loop frequency. The robot uses a Whole Body Inverse Dynamics (WBID) controller for balance and locomotion, implemented through custom ROS transmissions that handle the non-linear relationship between joint space and actuator space in the closed kinematic chains.[13][15]
Battery and power
Kangaroo features a new-generation power board designed in-house by PAL Robotics, with peak current capability for agile locomotion during high-demand movements. Battery autonomy is reported at up to 4 hours per charge, depending on the activity level and configuration.[1][14]
What are the Kangaroo's specifications?
| Category | Specification | Value |
|---|---|---|
| Physical | Height | 160 cm (5 ft 3 in) |
| Physical | Weight | 35 to 40 kg (77 to 88 lbs), depending on variant |
| Mobility | Total degrees of freedom | 28 (full body) |
| Mobility | Leg DOF | 6 per leg (12 actuated total in lower body) |
| Mobility | Leg weight | 12.5 kg per leg |
| Manipulation | Arm payload | 5 kg |
| Control | Control loop frequency | 2 kHz (up to 5 kHz capable) |
| Control | Network | EtherCAT |
| Sensors | Depth cameras | 4x Intel RealSense D435i |
| Sensors | IMU | Advanced Navigation Orientus (1 kHz) |
| Computing | Onboard PCs | 2 (real-time control + perception) |
| Computing | Processor | Intel Core i7, 32 GB RAM, 1 TB SSD |
| Computing | Optional AI kit | NVIDIA Jetson Orin (NX / AGX) |
| Software | OS | Ubuntu Linux |
| Software | Middleware | ROS / ROS 2 |
| Software | Simulators | Isaac Lab, MuJoCo, Gazebo |
| Power | Battery autonomy | Up to 4 hours |
| Actuators | Type | Custom linear ball-screw with integrated force sensors |
| Actuators | Count (legs) | 12 modules (6 per leg) |
What variants are available?
PAL Robotics offers Kangaroo in three configurations, all 160 cm tall, that scale up perception, AI, and torso capability.[1]
| Feature | Lite | Standard | Plus |
|---|---|---|---|
| Weight | 35 kg | 38 kg | 40 kg |
| Control loop | 1 kHz EtherCAT | 2 kHz EtherCAT | 2 kHz EtherCAT |
| Autonomy | Up to 4 hours | Up to 4 hours | Up to 4 hours |
| Legs | 2x 6-DOF | 2x 6-DOF | 2x 6-DOF |
| Torso | Fixed | 2 DOF | 2 DOF |
| Control PC | Intel i7, 32 GB, 1 TB SSD | Intel i7, 32 GB, 1 TB SSD | Intel i7, 32 GB, 1 TB SSD |
| Multimedia PC | Add-on | Intel i7, 32 GB, 1 TB SSD | Intel i7, 32 GB, 1 TB SSD |
| Perception kit | None | 4x RGB-D camera | 4x RGB-D camera |
| AI kit | None | NVIDIA Jetson Orin NX | NVIDIA Jetson Orin AGX |
| Force sensors | None | None | One per actuator |
| ROS 2 API | Yes | Yes | Yes |
How does Kangaroo compare to TALOS?
Kangaroo and TALOS represent two different design philosophies from PAL Robotics. TALOS was built for industrial-strength manipulation and research in factory environments, while Kangaroo targets dynamic locomotion and agility research. The following table summarizes the key differences.
| Feature | TALOS | Kangaroo |
|---|---|---|
| Year introduced | 2017 | 2021 (prototype), 2024 (commercial) |
| Height | 175 cm | 160 cm |
| Weight | 95 kg | 35 to 40 kg |
| Total degrees of freedom | 32 | 28 |
| Actuator type | Rotary with torque sensors | Linear ball-screw with force sensors |
| Kinematic chain | Open (serial) | Closed (serial-parallel hybrid) |
| Arm payload | 6 kg per arm | 5 kg |
| Walking speed | Up to 3 km/h | Not disclosed (optimized for dynamic gaits) |
| Battery life | 1.5 hours walking / 3 hours standby | Up to 4 hours |
| Control loop | 2 kHz (up to 5 kHz) | 2 kHz (up to 5 kHz) |
| Primary purpose | Industrial manipulation, torque control research | Dynamic locomotion, jumping, running research |
| Weight-to-DOF ratio | 2.97 kg/DOF | 1.25 to 1.43 kg/DOF |
The shift from rotary to linear actuators in closed kinematic chains gives Kangaroo several advantages for dynamic tasks. Placing motors near the pelvis reduces leg inertia significantly, enabling faster leg swing and more efficient energy use during locomotion. The peer-reviewed lower-body analysis reports "significant improvements" over TALOS "in terms of equivalent Cartesian inertia at the feet and centroidal angular momentum."[12] The trade-off is reduced maximum payload and a shorter overall height, reflecting the different research priorities of the two platforms.[2][6][12]
What is the Kangaroo Pro?
In 2025, PAL Robotics released the Kangaroo Pro, an upgraded variant featuring a full dual-arm configuration. While the base Kangaroo focused primarily on bipedal locomotion research with optional arm and torso degrees of freedom, the Pro version ships as a complete upper-body humanoid with manipulation capabilities, positioning it as a legged manipulator for dynamic tasks.[5][17]
The Pro variant has been demonstrated at major robotics conferences and trade shows, including Automatica 2025 in Munich (June 2025) and the Conference on Robot Learning (CoRL) 2025 and IEEE Humanoids 2025 in Seoul. At these events, PAL Robotics showcased Kangaroo Pro alongside its TIAGo Pro mobile manipulator, highlighting advances in robot learning, AI, and human-robot interaction.[17][18]
What is Kangaroo used for?
EU Project PRIMI
Kangaroo plays a central role in the PRIMI (Performance in Robotics Interaction via Mental Imagery) initiative, a Horizon Europe-funded project running from November 2023 through December 2027. PRIMI aims to integrate advanced neuromorphic technologies into robotic systems, combining research from neurophysiology, psychology, and machine learning to develop models for higher-order cognitive capabilities in robots.[4][19]
Within the PRIMI framework, Kangaroo is being equipped with several advanced technologies:
- Event-based cameras: Bio-inspired vision sensors that detect pixel-level brightness changes asynchronously rather than capturing standard video frames, offering high dynamic range, no motion blur, and microsecond-level latency[4]
- Neuromorphic computing: A Sensorimotor Board based on the SpiNNaker2 platform, co-designed by PAL Robotics, for enhanced processing of sensory information[4]
- Tactile sensors: Integrated into the end effectors and forearms to enable contact-rich human-robot interaction[4]
- Theory of Mind capabilities: Algorithms designed to help the robot understand and predict human behavior in shared environments[4]
The project plans to validate these technologies through clinical pilot studies focusing on robot-assisted stroke rehabilitation, where Kangaroo will be fitted with a head module for neurological rehabilitation functions in hospital settings.[4][19]
Academic deployments
The Technical University of Vienna (TU Wien) became the first institution to receive a commercial Kangaroo unit in mid-2024. The PAL Robotics team visited TU Wien to assist with the robot's setup and provide hands-on training for researchers. TU Wien's acquisition was funded through Austria's research infrastructure program, and the robot is being used for advanced bipedal locomotion studies.[3][20]
The Kangaroo platform has also been the subject of academic papers, including research presented at ICRA (International Conference on Robotics and Automation) in both 2021 and 2022. At the 6th Workshop on Legged Robots during ICRA 2022 in Philadelphia, PAL Robotics presented work on the hardware design and control architecture, demonstrating Kangaroo performing jumping motions using the Whole Body Inverse Dynamics controller.[13][15] A subsequent 2023 paper, later published in Robotics and Autonomous Systems (2024), detailed the modeling and numerical analysis of the Kangaroo lower body, analyzing the constrained dynamics of the hybrid serial-parallel floating-base system and comparing Cartesian inertia properties at the feet with those of TALOS.[12]
EU Project Memmo and Edinburgh collaboration
Prior to Kangaroo's development, PAL Robotics' work on the EU Memmo project with TALOS laid important groundwork. The University of Edinburgh's Learning and Motor Control Group has been working with PAL Robotics platforms since 2021, contributing to research in joint torque control, whole-body inverse dynamics, and multi-contact motion planning. Lessons learned from TALOS deployments at Edinburgh and LAAS-CNRS directly influenced the design priorities for Kangaroo, particularly in the areas of impact resilience and dynamic motion capability.[11][15]
How does Kangaroo fit the competitive landscape?
Kangaroo enters a global humanoid robotics market that has seen rapid growth and intensifying competition. MarketsandMarkets projects the humanoid robot market to reach $18 billion by 2030, up from roughly $2 billion in 2024, representing a compound annual growth rate exceeding 39%.[21]
Major competitors in the full-size humanoid space include:
- Boston Dynamics Atlas: The electric Atlas (successor to the hydraulic version retired in 2024) began commercial production in late 2025, with plans to deploy tens of thousands of units at Hyundai Motor Group manufacturing facilities.[22]
- Tesla Optimus: Tesla's general-purpose humanoid, which demonstrated cooking and household tasks with its Gen 3 version in late 2025, though large-scale autonomous deployment timelines remain uncertain.[23]
- Figure AI Figure 02: Raised over $1 billion at a $39 billion valuation, with the Figure 02 completing 10-hour autonomous shifts at BMW facilities for material handling and inspections in 2025.[24]
- Unitree H1/G1: Chinese manufacturer offering lower-cost humanoid platforms targeting both research and commercial applications.
- Agility Robotics Digit: A purpose-built logistics humanoid deployed at Amazon fulfillment centers.
Kangaroo differentiates itself from many of these competitors by targeting the research market rather than direct industrial deployment. Its open ROS-based software stack, modular hardware with optional arms and sensors, and emphasis on researcher accessibility position it as a platform for universities and labs studying fundamental locomotion and artificial intelligence problems. In this research-focused niche, its closest competitors include the iCub humanoid from the Italian Institute of Technology and various legged platforms from Agility Robotics (for locomotion research specifically), Boston Dynamics (Spot), and Unitree (Go2, B2).[2][11]
As a European company, PAL Robotics occupies a distinctive position in a market increasingly dominated by American and Chinese firms. The company's participation in over 60 EU-funded research projects and its deep integration with the European robotics ecosystem through initiatives like euROBIN provide a collaborative network that few competitors can match in the European research market.[5][8]
ELI5: What is the Kangaroo robot?
Kangaroo is a robot with two legs and no head, about as tall as a short adult, built by a company in Spain so that scientists can study how to make robots walk, balance, jump, and run. Most walking robots put a motor at every joint, like a knee or an ankle. Kangaroo is different: it puts almost all of its leg motors up high near its hips and uses clever rods and linkages to move the lower legs. Because the heavy motors are near the body instead of down by the feet, the legs are light and quick, which helps the robot move fast and bounce off the ground without falling over. Scientists buy Kangaroo to test new ideas and new robot "brains" (AI software) on a real, agile pair of legs.
See also
- Humanoid robot
- PAL Robotics
- TALOS
- Bipedal locomotion
- Robot Operating System
- Embodied AI
- Reinforcement learning
References
- PAL Robotics. "Kangaroo | Biped Humanoid Robot for Locomotion Research" and official Kangaroo datasheet (2024). pal-robotics.com/robot/kangaroo ↩
- "Watch Kangaroo humanoid robot moves swiftly, squat with a heavy box." Interesting Engineering. interestingengineering.com ↩
- "PAL Robotics' Kangaroo Robot Goes on Sale." Humanoid Robotics Technology. humanoidroboticstechnology.com ↩
- "Leaping Forward: Kangaroo Robot Joins EU Project PRIMI." PAL Robotics Blog. pal-robotics.com ↩
- "Timeline." PAL Robotics. pal-robotics.com/timeline ↩
- PAL Robotics. "TALOS | High-Performance Humanoid Robot." pal-robotics.com/robot/talos ↩
- Guizzo, E. "TALOS Humanoid Now Available from PAL Robotics." IEEE Spectrum. spectrum.ieee.org ↩
- "Press release | PAL Robotics celebrates 20 years." PAL Robotics. pal-robotics.com ↩
- "PAL Robotics to open a robots factory in Abu Dhabi." BBK Online. bbkonline.com ↩
- "PAL Robotics." AEC Online. aeconline.ae ↩
- "Advancing Humanoid Robots: PAL Robotics Strides Forward With Orientus." Advanced Navigation. advancednavigation.com ↩
- Mingo Hoffman, E., Curti, A., Miguel, N., Kothakota, S.K., Molina, A., Roig, A., Marchionni, L. "Modeling and Numerical Analysis of Kangaroo Lower Body based on Constrained Dynamics of Hybrid Serial-Parallel Floating-Base Systems." Robotics and Autonomous Systems, 2024 (arXiv:2312.04161). arxiv.org ↩
- Roig, A., Kothakota, S.K., Miguel, N., Fernbach, P., Mingo Hoffman, E., Marchionni, L. "On the Hardware Design and Control Architecture of the Humanoid Robot Kangaroo." 6th Workshop on Legged Robots, ICRA 2022. hal.science ↩
- "Kangaroo Robot: From Prototype to Your Trusted Research Companion." PAL Robotics Blog. pal-robotics.com ↩
- "Kangaroo robot - Latest updates of PAL Robotics' biped research platform." PAL Robotics Blog. pal-robotics.com ↩
- "Building the future of robotics with open-source and ROS 2." PAL Robotics Blog. pal-robotics.com ↩
- "Automatica 2025: PAL Robotics to demonstrate humanoid embodied AI." Robotics 24/7. robotics247.com ↩
- "PAL Robotics showcases TIAGo Pro and Kangaroo at major robotics events in Asia." Robotics and Automation News. roboticsandautomationnews.com ↩
- "PAL Robotics' Kangaroo Biped Robot Joins Project PRIMI." Humanoid Robotics Technology. humanoidroboticstechnology.com ↩
- "New Addition to TU Wien: The Kangaroo Robot." PAL Robotics. pal-robotics.com ↩
- "Humanoids on the move: How 2025 became the breakthrough year for AI driven robotics." AI Summit Silicon Valley. techequity-ai.org ↩
- "Boston Dynamics beats Tesla to the humanoid robot punch." The Register. theregister.com ↩
- "What Tesla's Optimus robot can do in 2025 and where it still lags." Interesting Engineering. interestingengineering.com ↩
- "Boston Dynamics IPO and $100B Valuation: How It Compares to Tesla Optimus, Figure AI and Humanoid Rivals." RobotToday. robottoday.com ↩
Improve this article
Add missing citations, update stale details, or suggest a clearer explanation. Every suggestion is reviewed for sourcing before it goes live.
5 revisions by 1 contributors · full history