Roboligent Robin
Last edited
Fact-checked
In review queue
Sources
22 citations
Revision
v4 · 4,267 words
Fact-checks are independent of edits: a reviewer re-verifies the article against its sources and stamps the date. How we verify
| Robin | |
|---|---|
 | |
| General information | |
| Manufacturer | Roboligent |
| Country of origin | United States |
| Year unveiled | 2025 (Automate 2025) |
| Status | In production (Proof of Concept deployments) |
| Height | ~150 cm |
| Weight | ~80 kg |
| Degrees of freedom | 14 |
| Payload capacity | 10 kg |
| Battery life | 8 hours |
| Max speed | 1.25 m/s (4.5 km/h, 2.8 mph) |
| Price | $85,000 USD |
| Website | roboligent.com/robin |
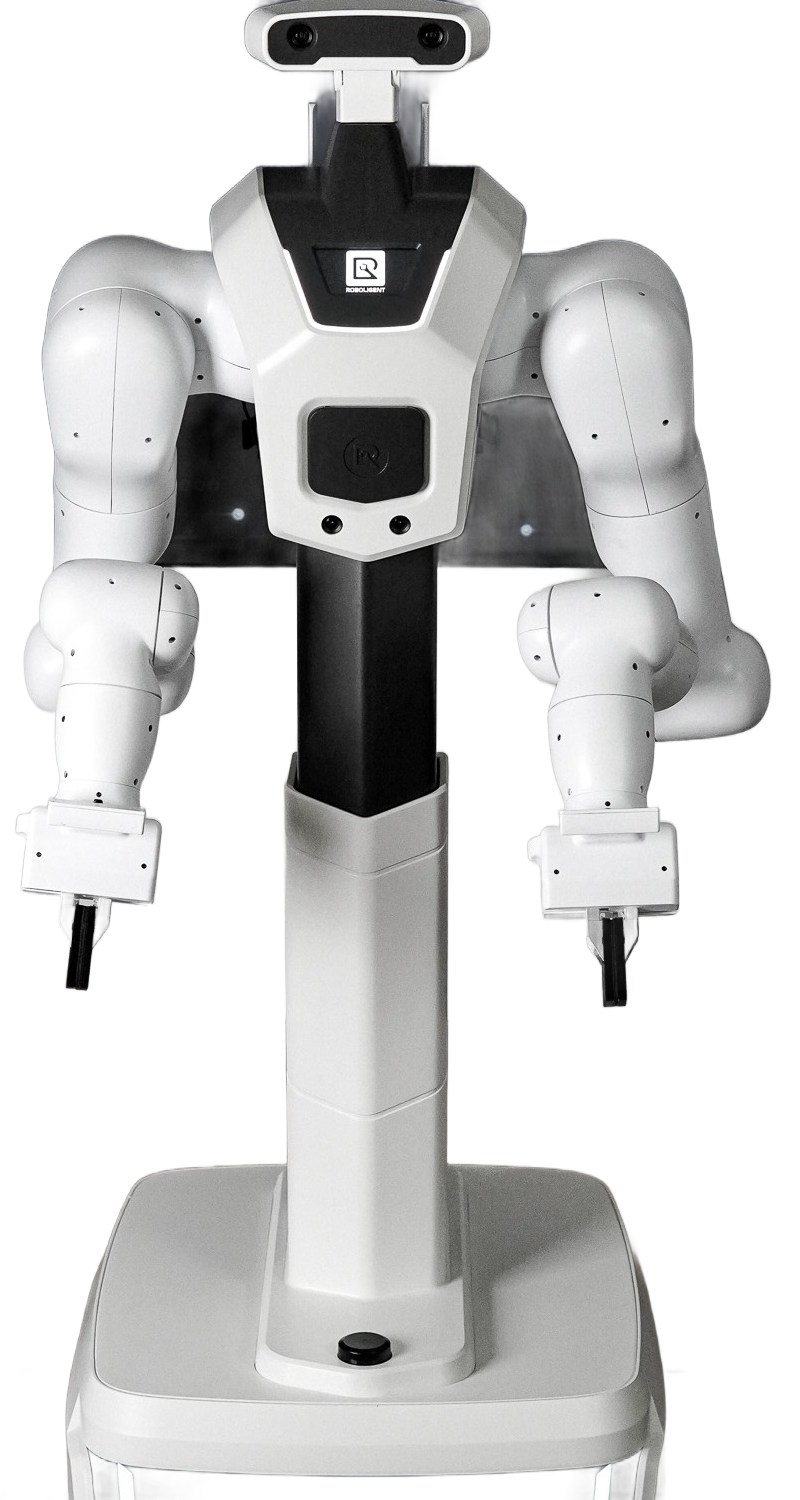
Robin is a mobile dual-arm humanoid robot developed by Roboligent, a robotics company headquartered in Round Rock, Texas. Designed specifically for smart factory automation, Robin combines patented compliant manipulator technology with artificial intelligence-based imitation learning to automate material handling, machine tending, and logistics tasks in manufacturing environments. The robot stands approximately 150 cm tall, weighs approximately 80 kg, and features a wheeled mobile base paired with two force-controlled "soft robot" arms capable of handling payloads up to 10 kg. Independent humanoid catalog Humanoid Guide lists Robin at a price of approximately $85,000.[1][17]
Unlike rigid industrial robots that follow pre-programmed trajectories, Robin uses elastic actuators that yield on contact, enabling it to handle delicate objects and work safely alongside human workers without protective barriers. Its imitation learning system allows operators to teach new tasks through physical demonstration rather than traditional programming, significantly reducing deployment time. Roboligent publicly unveiled Robin at the Automate 2025 trade show in Detroit in May 2025 and returned to Automate 2026 in Chicago in June 2026, positioning the robot within a physical AI strategy that pairs its compliant arms with imitation learning and zero-shot generalization. The company describes Robin, in its own words, as a robot that "redefines factory automation with flexible, safe, and intuitive task learning," and has conducted Proof of Concept (PoC) projects at various industrial sites both domestically and internationally.[1][2][19][20]
History
Roboligent and its origins
Roboligent was founded in May 2016 by Bongsu Kim under the name LinkDyn Robotics.[3] The company is based in Round Rock, Texas, near Austin. Kim founded the company after completing his Ph.D. at the University of Texas at Austin, where he spent five years (2011 to 2016) as a graduate research assistant developing HARMONY, an upper-body exoskeleton robot for rehabilitation.[4][5] His doctoral work involved mechanical design, manufacturing, kinematics and dynamics modeling, and control strategies for upper-limb rehabilitation, with the final HARMONY prototype built in cooperation with Meka Robotics.[5]
Before his time at UT Austin, Kim served as a research engineer at Korea Electric Power Corporation (KEPCO) from 2006 to 2011, where he participated in system design, manufacturing management, experimentation, and operation of large-scale flywheel energy storage systems and conducted reliability assessments for fossil fuel plants.[4] He holds a Bachelor's degree in Mechanical Engineering from Hanyang University, a Master's degree in Mechanical Engineering from the Korea Advanced Institute of Science and Technology (KAIST), and a Ph.D. in Robotics and Rehabilitative Robotics from UT Austin.[4]
The company was later renamed from LinkDyn Robotics to Roboligent to better reflect its mission of building intelligent robots. From the outset, Roboligent focused on developing precise, force-controlled robots designed to operate safely alongside humans. The company's early work centered on compliant manipulator technology and teleoperation systems for automation in sectors including physical therapy, warehousing, retail, surface finishing, and advanced assembly.[3]
REGEN rehabilitation robot
Before developing Robin, Roboligent created Optimo Regen (also called REGEN), a force-controlled rehabilitation robot that became the company's first product.[6] REGEN is a multi-modal physical therapy automation system consisting of a human-interactive robot arm attached to a motorized base that connects to patients via arm or leg braces. The device provides therapeutic motions to patients with neuromuscular disorders and motor deficits, automating the physically demanding repetitive exercises that therapists would otherwise perform manually.
REGEN is left-right interchangeable and supports arm, knee, leg, and gait exercises in various postures. The device features a touchscreen interface for managing patient profiles, programming motions, and performing exercises. Clinical trials have demonstrated promising results: chronic stroke patients exhibited noticeable improvements in walking performance after a single 15-minute gait training session, and acute stroke patients experienced substantial upper limb mobility recovery after 10 days of robotic therapy sessions.[6] A published feasibility study confirmed the device's safety profile, achieving a 90% patient satisfaction rate with no serious adverse effects.[7]
The development of REGEN was critical to Robin's later creation because it allowed Roboligent to refine its core competency in compliant, force-controlled actuation. The same underlying technology that enables REGEN to interact safely with human patients forms the foundation of Robin's "soft robot" arms.
Funding and government contracts
Roboligent's development has been supported by a combination of government grants and equity crowdfunding:
| Funding source | Type | Amount | Period |
|---|---|---|---|
| NSF SBIR Phase I, II, IIB | Government grant | $1.2 million total | 2017 to 2022 |
| NSF TECP supplement | Government grant | Up to $150,000 | 2020 |
| U.S. Air Force AFWERX STTR Phase I | Government contract | Approximately $109,965 | March 2024 |
| U.S. Air Force AFWERX STTR Phase II | Government contract | $1.8 million | September 2024 |
| StartEngine crowdfunding | Equity crowdfunding | Over $300,000 (125+ investors) | 2021 |
The National Science Foundation (NSF) SBIR awards (Award #1853183) supported the development of force-and-impedance-based exoskeleton robots for rehabilitation, enabling Roboligent to develop and commercialize its cutting-edge force-control compliant robot arm technology.[8] The NSF also awarded Roboligent a Technology Enhancement for Commercial Partnerships (TECP) grant, a supplement of up to $150,000 provided to current SBIR or STTR awardees to facilitate commercialization.[9]
In March 2024, Roboligent was selected by AFWERX (the U.S. Air Force innovation arm) for a Small Business Technology Transfer (STTR) Phase I award of approximately $109,965 to explore how its rehabilitation robot could improve outcomes for military rehabilitation.[10][22] This was followed in September 2024 by a $1.8 million STTR Phase II contract for "Advanced Robotic-Assisted and Customized Rehabilitation Technology" to address challenges in the Department of the Air Force, including clinical trials of its robotic rehabilitation solution in military hospitals.[11] According to the U.S. federal SBIR portfolio system, Roboligent has received four NSF and Department of the Air Force awards totaling approximately $2.88 million in non-dilutive research funding.[22]
On the private funding side, Roboligent conducted an equity crowdfunding campaign on StartEngine with a pre-money valuation of $28.8 million, raising over $300,000 from more than 125 investors.[12][18]
When and where was Robin unveiled?
Roboligent publicly unveiled Robin as an AI-based humanoid robot at Automate 2025, held May 12 to 15, 2025, at Huntington Place in Detroit, Michigan.[19][21] Automate, organized by the Association for Advancing Automation (A3), is the largest automation trade show in the Americas; the 2025 edition drew more than 900 exhibitors and roughly 45,000 registrants, a record for the event.[21] Robin's debut marked the company's transition from rehabilitation robotics to industrial automation. The robot was introduced as "the next generation of intelligent manufacturing automation," designed to address chronic labor shortages in manufacturing and logistics.[1] Robin represented the culmination of Roboligent's years of work on compliant actuator technology, now applied to a mobile bimanual platform for factory environments.
Roboligent returned the following year to Automate 2026, held June 22 to 25, 2026, at McCormick Place in Chicago, where it exhibited Robin under a "physical AI" banner.[20] In its show materials, the company presented Robin as a general-purpose system designed to see, reason, and interact with unstructured factory environments through a combination of imitation learning and zero-shot generalization, framing the robot as part of a broader industry shift away from rigid, single-task automation and toward versatile, general-purpose robots.[20]
In November 2025, Roboligent partnered with Tesollo, a South Korean robotic gripper specialist, to showcase Robin at RobotWorld 2025, held at KINTEX Exhibition Hall in Goyang, South Korea, from November 5 to 8.[2] The two companies, which had signed a Memorandum of Understanding (MOU) for business collaboration earlier that year, demonstrated Robin equipped with Tesollo's DG-5F dexterous robotic hand. The DG-5F is a fully actuated 20-degree-of-freedom humanoid robotic hand (four joints across each of five fingers) measuring approximately 20 cm in length and weighing about 1.4 kg, with a gripping force of up to 7 kg, comparable to an average adult male hand and capable of performing a wide range of tasks that closely mimic human hand movements.[2][13]
At the RobotWorld exhibition (Booth B03), the team conducted real-time demonstrations of precision handling, showcasing Robin's ability to perform delicate object manipulation using the combined Roboligent-Tesollo system.[2] Roboligent founder and CEO Bongsu Kim said, "Tesollo's excellent robot hand technology will significantly enhance ROBIN's precision manipulation accuracy."[2] Roboligent stated that Robin was undergoing Proof of Concept (PoC) projects at various industrial sites both domestically and internationally at the time of the demonstration, and referenced mass-production verification work underway with a major manufacturer.[2]
Design and technology
Compliant manipulator technology
Robin's most distinguishing engineering feature is its patented compliant manipulator technology, which Roboligent describes as "soft robot" arms.[1] Unlike conventional industrial robots that use rigid actuators to achieve precise positional control, Robin's arms employ elastic actuators that provide inherent mechanical compliance. These actuators yield on contact rather than resisting it, a property that serves two critical purposes: it enables the robot to handle fragile or irregularly shaped objects without damaging them, and it allows the robot to work in close proximity to humans without posing a safety risk.
The compliant arm design traces directly to Bongsu Kim's doctoral research on the HARMONY rehabilitation exoskeleton at UT Austin. HARMONY used series elastic actuators with five active degrees of freedom in its anatomical shoulder mechanism and additional DOF in its elbow and wrist, with force and impedance controllability that enabled safe human-robot physical interaction.[5] Roboligent adapted and commercialized this force-control technology, first in the REGEN rehabilitation robot and then in Robin's industrial arms.
Each of Robin's two arms uses precision force control actuators that enable the robot to sense and modulate the forces it applies to objects and surfaces. This capability is essential for tasks like loading delicate parts into CNC machines or handling finished components that could be scratched or deformed by excessive grip force. The bimanual configuration (two independent arms working in coordination) enables complex, human-like manipulation tasks that single-arm robots cannot perform, such as holding an object with one hand while operating on it with the other.[1]
Mobile base and navigation
Robin uses a wheeled mobile base rather than bipedal legs, a design choice that prioritizes stability, reliability, and practicality in factory environments over the versatility of legged locomotion.[1] The wheeled platform allows Robin to navigate smoothly across flat factory floors, moving between workstations, storage areas, and production lines at speeds up to 1.25 m/s (4.5 km/h).
The mobile base integrates autonomous navigation capabilities, allowing Robin to plan and execute paths through complex factory layouts without human guidance. This autonomous mobile robot (AMR) functionality means Robin can be deployed in existing facilities without extensive modifications to production lines or floor layouts. The robot adapts to changing factory configurations, replanning routes as needed when obstacles or layout changes are detected.[1][14]
The combination of a mobile base with dual manipulator arms places Robin in the growing category of mobile manipulators, robots that merge the transportation capabilities of autonomous mobile robots with the dexterous manipulation capabilities of robotic arms. This hybrid design allows Robin to both travel to where work needs to be done and perform manipulation tasks upon arrival, eliminating the need for separate transport and manipulation systems.
Imitation learning and AI
Robin's AI system eliminates the need for traditional robot programming. Instead of writing code or configuring waypoints, users teach Robin new tasks through physical demonstration, a technique known as imitation learning (also called learning from demonstration).[1][14] An operator performs the desired task while Robin observes, and the robot's AI system learns to replicate the demonstrated behavior. This approach dramatically reduces the time required to deploy Robin on new tasks, as factory workers with no robotics expertise can train the robot simply by showing it what to do. Roboligent summarizes the workflow in its own words: "Instead of writing complex code, users can simply demonstrate tasks, and Robin learns by observation."[1]
Roboligent frames Robin's learning stack as pairing imitation learning with zero-shot generalization, so that the robot can adapt to unfamiliar tasks without task-specific reprogramming, a capability the company positions as part of the broader shift toward physical AI and general-purpose robots.[20]
The imitation learning system is complemented by AI-driven real-time control that allows Robin to adjust its actions based on observations of its environment.[14] Rather than blindly repeating memorized trajectories, Robin interprets sensor data to adapt to variations in object positions, orientations, and conditions. This adaptive capability is important in manufacturing environments where parts may not always arrive in identical positions or where environmental conditions (lighting, temperature, vibration) can vary.
Robin also integrates object recognition capabilities, enabling it to identify parts, materials, and tools visually. Combined with its force-sensing arms and autonomous navigation, this gives the robot a perception-action loop that allows it to make decisions about how to approach, grasp, and manipulate objects in real time.
Fleet management
Roboligent has developed an integrated fleet management system that enables the coordination of multiple Robin units operating within the same facility.[1][14] The system allows Robin robots to communicate with each other and with factory equipment, distributing tasks across the fleet to optimize throughput and minimize idle time.
In a fleet deployment scenario, the management system tracks the status of each Robin unit (location, current task, battery level, availability) and assigns incoming tasks to the most appropriate robot based on proximity, workload, and capability. The robots coordinate autonomously, adapting to changes in production schedules, machine availability, and priority levels without requiring manual intervention from human supervisors.
This fleet management capability is designed to make scaling straightforward: a factory can start with a single Robin unit and gradually add more as automation needs grow, with the fleet management system handling the complexity of multi-robot coordination.
Teleoperation
In addition to autonomous operation, Robin supports teleoperation, allowing human operators to control the robot remotely from a safe distance.[14] This capability is intended for scenarios involving hazardous materials, contaminated environments, or situations where direct human presence is undesirable. Through teleoperation, an operator can leverage Robin's compliant arms and mobile base to perform complex manipulation tasks in dangerous locations while remaining in a safe control room.
The teleoperation mode also serves as a data collection mechanism for improving Robin's autonomous capabilities. When an operator teleoperates Robin to perform a new task, the demonstration data can be captured and used to train the robot's imitation learning system, enabling it to perform the same task autonomously in the future.
Technical specifications
| Category | Parameter | Value |
|---|---|---|
| Physical | Height | ~150 cm |
| Physical | Weight | ~80 kg |
| Physical | IP rating | IP20 |
| Mobility | Locomotion type | Wheeled mobile base |
| Mobility | Maximum speed | 1.25 m/s (4.5 km/h, 2.8 mph) |
| Mobility | Navigation | Autonomous (AMR) |
| Manipulation | Degrees of freedom | 14 |
| Manipulation | Number of arms | 2 (bimanual) |
| Manipulation | Payload capacity | 10 kg |
| Manipulation | Fingers per hand | 2 to 5 (interchangeable end effectors) |
| Manipulation | Compatible end effectors | Tesollo DG-5F (20-DOF dexterous hand) |
| Actuators | Type | Compliant elastic actuators with force control |
| Power | Battery life | 8 hours |
| Connectivity | Interfaces | Ethernet, Wi-Fi |
| AI | Task learning | Imitation learning (learning from demonstration) |
| AI | Control | AI-driven real-time adaptive control |
| AI | Perception | Object recognition, environment sensing |
| Software | Fleet management | Integrated multi-robot coordination system |
| Software | Teleoperation | Supported |
Note: Roboligent has not published a comprehensive public specification sheet for Robin, and the company's official product pages list no dimensions. The physical specifications above are drawn primarily from the independent humanoid robot catalog Humanoid Guide and may be revised as the product continues development.[17]
What is Robin used for?
Robin is designed for deployment across several industrial and logistics application areas.
Machine tending
Robin's primary target application is CNC machine tending: the automated loading and unloading of raw materials and finished parts to and from CNC machines, press machines, and other manufacturing equipment.[14] A single Robin unit can manage multiple machines simultaneously, adapting its actions based on each machine's status, requirements, and production schedule. By intelligently communicating with multiple machines operating with varying procedures and timelines, Robin optimizes the workflow to increase overall productivity.[14]
Machine tending is a task well suited to Robin's combination of mobility (allowing it to move between machines), bimanual manipulation (enabling it to handle parts with two hands), and force control (preventing damage to precision-machined components).
Material handling and logistics
Robin is designed to automate material transport within factories and warehouses, including fetching raw materials from storage to production lines, transporting machined parts to quality inspection stations, and performing bin picking and shelf picking for order fulfillment.[14] Its mobile base allows it to cover large facility footprints, while its dual arms enable it to carry, place, and organize materials without additional equipment.
Hazardous environment operations
Through its teleoperation capabilities, Robin can be deployed in environments that are unsafe for human workers.[14] Operators control the robot remotely, using its arms and mobile base to perform manipulation tasks involving dangerous materials, contaminated areas, or other high-risk scenarios. This application leverages Robin's force-controlled arms to maintain the precision and dexterity needed for complex handling tasks even under remote control.
Healthcare and rehabilitation (future)
Roboligent has indicated that Robin's mobility and bimanual manipulation capabilities could extend to healthcare settings in the future, potentially assisting with material transport and handling tasks in hospitals.[14] The company's existing expertise in rehabilitation robotics through REGEN positions it well for healthcare applications that require safe human-robot interaction.
Team and leadership
| Name | Role | Background |
|---|---|---|
| Bongsu Kim | Founder and CEO | Ph.D. in Robotics, UT Austin; formerly KEPCO research engineer; developed HARMONY exoskeleton |
| Luis Sentis | Chief Innovation Officer | Professor of Aerospace Engineering, UT Austin; director of Human Centered Robotics Lab |
| James Debacker | Senior Robotics Engineer | Robotics engineering |
| Yi Herng Ong | Mechanical Engineer | Mechanical design |
| Jovita Ezeokafor | Senior Software Engineer | Software development |
The involvement of Luis Sentis as Chief Innovation Officer is notable. Sentis is a professor in the Department of Aerospace Engineering and Engineering Mechanics at UT Austin, where he leads the Human Centered Robotics Laboratory (HCRL).[15] He was the UT Austin lead for DARPA's Robotics Challenge with NASA Johnson Space Center, where he helped design and test the Valkyrie humanoid robot. Sentis is also a co-founder, chairman, and chief scientific officer of Apptronik, the company behind the Apollo humanoid robot, which was spun out of the HCRL in 2016.[15] His dual involvement with both Roboligent and Apptronik reflects the interconnected nature of the Austin, Texas robotics ecosystem and its roots in UT Austin research.
How does Robin compare to other humanoid robots?
Robin operates in the growing market for mobile manipulator robots and humanoid robots designed for industrial automation, competing with United States humanoid developers such as Agility Robotics and Figure AI as well as vertically integrated programs like Tesla's Optimus. The global humanoid robot market was valued at over $3.14 billion in 2025 and is projected to grow at a compound annual growth rate (CAGR) of approximately 39% through 2030, driven by manufacturing labor shortages, reshoring trends, and advances in AI.[16]
Robin's competitive positioning differs from many high-profile humanoid robots in several important ways:
| Feature | Robin (Roboligent) | Apollo (Apptronik) | Figure 02 (Figure AI) | Optimus (Tesla) |
|---|---|---|---|---|
| Height | ~150 cm | 173 cm | 170 cm | 173 cm |
| Weight | ~80 kg | 73 kg | 70 kg | ~73 kg |
| Locomotion | Wheeled base | Bipedal (also wheeled option) | Bipedal | Bipedal |
| Payload | 10 kg | 25 kg | 25 kg | ~20 kg |
| Battery life | 8 hours | 4 hours (swappable) | ~5 hours | Not disclosed |
| DOF | 14 | 44+ | Not disclosed | Not disclosed |
| Price | ~$85,000 | Not disclosed | Not disclosed | Target ~$20,000-30,000 |
| Task learning | Imitation learning | NVIDIA GR00T, Google Gemini | OpenAI integration | Tesla AI |
| Key differentiator | Compliant soft arms, long battery | Force-controlled linear actuators | AI-first design | Vertical integration |
| Primary focus | Factory machine tending | General-purpose industrial | General-purpose | General-purpose |
Robin's use of a wheeled base rather than bipedal legs represents a pragmatic trade-off. While bipedal locomotion offers greater versatility for navigating stairs, uneven terrain, and human-designed spaces, wheeled platforms provide superior stability, energy efficiency, and reliability on flat factory floors. Robin's 8-hour battery life, roughly double that of most bipedal humanoid competitors, is a direct benefit of this energy-efficient wheeled design.
Robin's compliant arm technology provides a distinct advantage in applications requiring delicate handling and safe human-robot interaction. While competitors like Apptronik's Apollo also emphasize force control, Robin's approach derives from a specialized lineage of rehabilitation robotics where safe physical contact with humans is not merely desirable but essential.
At $85,000, Robin occupies a mid-range price point that is accessible to small and medium-sized manufacturers. This positions it below the estimated costs of more complex bipedal systems from major competitors while remaining significantly above simple single-arm collaborative robots (cobots).
However, Robin faces significant competitive challenges. The company's limited funding (approximately $3.5 million in government grants and crowdfunding) contrasts sharply with the hundreds of millions to billions of dollars raised by competitors like Apptronik ($935 million), Figure AI ($750 million+), and the internal resources of Tesla. Scaling manufacturing and achieving widespread commercial deployment will require substantially more capital.
Future development
Roboligent has indicated several directions for Robin's continued development:
- Expanded PoC programs: The company is actively conducting Proof of Concept projects at industrial sites domestically and internationally to validate Robin's performance in real-world manufacturing environments.[2]
- Gripper ecosystem: The partnership with Tesollo and the successful integration of the DG-5F dexterous hand suggests Roboligent is building an ecosystem of interchangeable end effectors to expand Robin's manipulation capabilities.[2]
- Healthcare applications: Building on its REGEN rehabilitation robotics expertise, Roboligent may extend Robin's deployment into hospital and clinical settings for material handling and logistics tasks.[14]
- Military rehabilitation: The $1.8 million AFWERX STTR Phase II contract will support clinical trials of Roboligent's robotic rehabilitation technology in military hospitals through 2026, potentially yielding insights applicable to Robin's development.[11]
The company's trajectory from rehabilitation robotics to industrial automation reflects a broader strategy of leveraging its core compliant actuator technology across multiple markets. Whether Roboligent can scale Robin from PoC demonstrations to volume production and widespread commercial deployment will depend on its ability to secure additional funding, expand its engineering team, and demonstrate clear return on investment for manufacturing customers.
See also
- Humanoid robots
- Humanoid robot
- Roboligent
- Apptronik
- Apollo (Apptronik)
- Imitation learning
- Physical AI
- Autonomous mobile robot
- Collaborative robot
- Industrial robot
- Machine tending
References
- "ROBIN." Roboligent official product page. https://www.roboligent.com/robin ↩
- "Roboligent and Tesollo Showcase Dual-Arm Humanoid Robot with Delicate Manipulation Capabilities at RobotWorld 2025." Roboligent, November 2025. https://www.roboligent.com/post/roboligent-and-tesollo-showcase-dual-arm-humanoid-robot-with-delicate-manipulation-capabilities-at-r ↩
- "Roboligent." Crunchbase Company Profile. https://www.crunchbase.com/organization/linkdyn-robotics ↩
- "Bongsu Kim, CEO & Founder at Roboligent." The Org. https://theorg.com/org/roboligent/org-chart/bongsu-kim ↩
- Kim, Bongsu, and Ashish D. Deshpande. "An upper-body rehabilitation exoskeleton Harmony with an anatomical shoulder mechanism: Design, modeling, control, and performance evaluation." *The International Journal of Robotics Research* 36, no. 4 (2017): 414-435. https://journals.sagepub.com/doi/abs/10.1177/0278364917706743 ↩
- "REGEN." Roboligent official product page. https://www.roboligent.com/regen ↩
- "Robot-mediated impairment-oriented and task-specific training on upper limb post stroke: feasibility and preliminary effects on physical function and quality of life." *Frontiers in Neurology* 15 (2024). https://www.frontiersin.org/journals/neurology/articles/10.3389/fneur.2024.1415773/full ↩
- "NSF Award Search: Award #1853183 - SBIR Phase II: Force And Impedance-Based Exoskeleton Robots For Seamless Assistance And Neurologically Sound Rehabilitation." National Science Foundation. https://www.nsf.gov/awardsearch/showAward?AWD_ID=1853183 ↩
- "LinkDyn Robotics wins the NSF TECP grant." Roboligent, August 24, 2020. https://roboligent.com/2020/08/24/linkdyn-robotics-wins-the-nsf-tecp-grant/ ↩
- "Roboligent wins Air Force AFWERX STTR Phase I." Roboligent, March 2024. https://www.roboligent.com/post/roboligent-wins-air-force-afwerx-sttr-phase-i ↩
- "Roboligent Selected for $1.8MM STTR Phase II Contract by AFWERX." Roboligent, September 2024. https://www.roboligent.com/post/roboligent-selected-for-1-8mm-sttr-phase-ii-contract-by-afwerx ↩
- "Roboligent on StartEngine 2021." Kingscrowd. https://kingscrowd.com/roboligent-on-startengine-2021/ ↩
- "TESOLLO unveils dexterous robot hand for humanoids." *The Robot Report*, February 15, 2025. https://www.therobotreport.com/tesollo-unveils-dexterous-robot-hand-for-humanoids/ ↩
- "Solution." Roboligent official solutions page. https://www.roboligent.com/solution ↩
- "Luis Sentis." Department of Aerospace Engineering and Engineering Mechanics, University of Texas at Austin. https://www.ae.utexas.edu/people/faculty/faculty-directory/sentis ↩
- "Humanoid Robot Market Set for Rapid Expansion: Size, Share & Trends (2025-2030)." GlobeNewsWire, April 8, 2026. https://www.globenewswire.com/news-release/2026/04/08/3270312/0/en/Humanoid-Robot-Market-Set-for-Rapid-Expansion-Size-Share-Trends-2025-2030.html ↩
- "ROBIN: Mobile Dual-Arm Humanoid Robot for Smart Factories." Humanoid Guide product page. https://humanoid.guide/product/robin/ ↩
- "Roboligent." StartEngine offering page. https://www.startengine.com/offering/roboligent ↩
- "Roboligent unveils AI-based humanoid robot ROBIN at Automate 2025." Roboligent, LinkedIn, 2025. https://www.linkedin.com/posts/roboligent_aw2025-automation-ai-activity-7313238955880038401-cslg ↩
- "Roboligent | Physical AI & Mobile Humanoid Robots." Automate 2026 Exhibitor Directory, Association for Advancing Automation. https://www.automateshow.com/exhibitors/roboligent-inc ↩
- "Automate 2025 Celebrates Record-Breaking Success Amid Rising Demand for Robotics and Automation." Association for Advancing Automation (A3), 2025. https://www.automateshow.com/a3-press-releases/automate-2025-celebrates-record-breaking-success-amid-rising-demand-for-robotics-and-automation ↩
- "Firm: Roboligent, Inc." U.S. SBIR portfolio. https://www.sbir.gov/portfolio/1194479 ↩
Improve this article
Add missing citations, update stale details, or suggest a clearer explanation. Every suggestion is reviewed for sourcing before it goes live.
3 revisions by 1 contributors · full history