Torobo
Last edited
Fact-checked
In review queue
Sources
20 citations
Revision
v5 · 3,759 words
Fact-checks are independent of edits: a reviewer re-verifies the article against its sources and stamps the date. How we verify
| Torobo | |
|---|---|
 | |
| General information | |
| Manufacturer | Tokyo Robotics |
| Country of origin | Japan |
| Year unveiled | 2017 |
| Status | Active (under development) |
| Height | 1,615 mm (5 ft 4 in) |
| Weight | ~120 kg (265 lb) |
| Degrees of freedom | 24 |
| Payload (per arm) | 7 kg (worst-case posture); 20 kg (max force) |
| Battery life | Up to 3 hours |
| Parent company | Yaskawa Electric (since July 2025) |
| Website | robotics.tokyo |
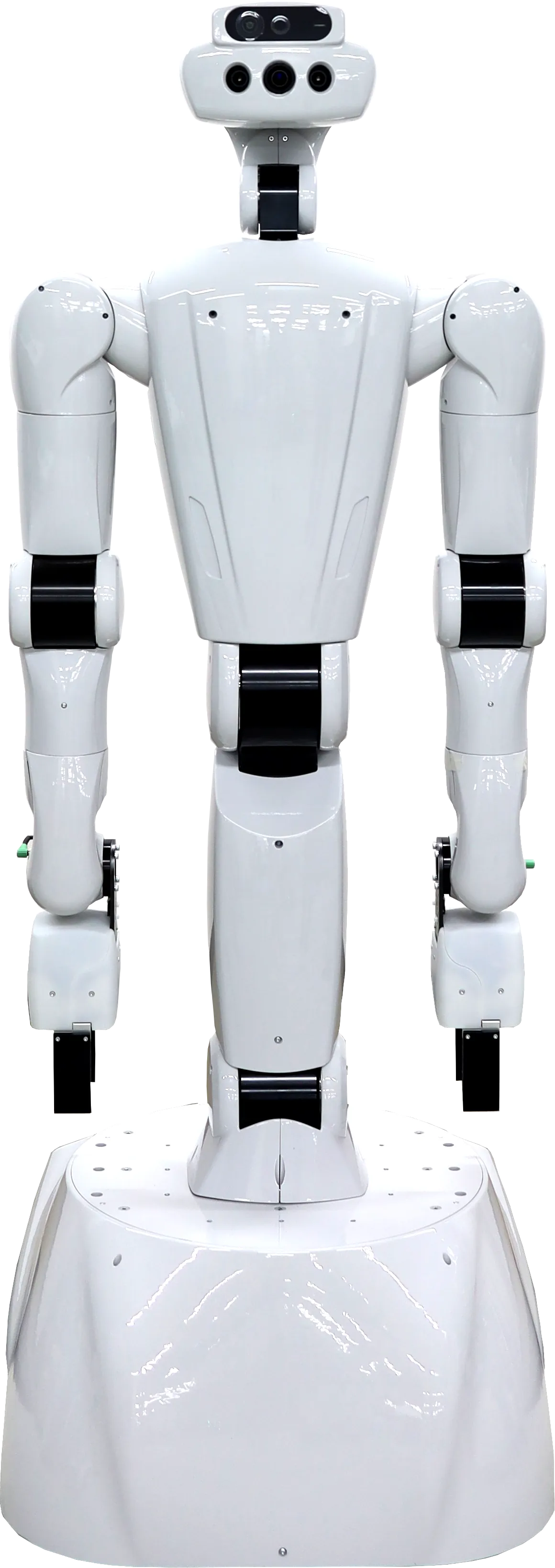
Torobo is a wheeled humanoid robot developed by Tokyo Robotics, a Japanese robotics startup that originated from Waseda University. Designed as a heavy-duty research and industrial platform, Torobo combines 7-axis dual arms, torque sensors at every arm and waist joint, and an omnidirectional mobile base to perform manipulation tasks that require active physical contact with objects, people, and the surrounding environment. The robot's name is derived from the Japanese abbreviation of "Tokyo Robotics" and is also a nod to the broader tradition of naming Japanese robots with playful portmanteaus.
Since its introduction, Torobo has been adopted by research institutions and companies including Sony, Panasonic, and Waseda University as a platform for studying machine learning, force-controlled manipulation, and autonomous task execution [1]. In July 2025, Tokyo Robotics became a wholly owned subsidiary of Yaskawa Electric Corporation, one of the world's largest industrial robot manufacturers, signaling a push toward commercial-scale deployment of humanoid systems [2].
Tokyo Robotics
Company history
Tokyo Robotics Inc. was founded in 2015 by Yoshihiro Sakamoto and a fellow alumnus from Waseda University's robotics laboratory. Sakamoto, who serves as CEO, earned his Ph.D. from Waseda University in 2013, where his doctoral research focused on indoor localization using GPS-compatible signals for robot navigation. Before founding the company, he accumulated experience as both a university researcher and a freelance engineer, building expertise in robotics, satellite navigation, machine learning, embedded systems, electrical circuit design, FPGA coding, and web development [3].
The company's CTO, Hiroaki Arie (Ph.D.), brings a background in cognitive robotics from research positions at RIKEN and Waseda University. He also developed autonomous driving AI at Denso Corporation and worked on reinforcement learning applications at ALBERT Inc. [3]. Professor Shigeki Sugano of Waseda University serves as the company's technical adviser. Sugano is an IEEE and JSME fellow with over 500 published papers and more than 20 patents in robotics, specializing in humanoid robot design and human-robot interaction [3].
Tokyo Robotics states its mission as creating "a world where robots do repetitive and hazardous tasks, while humans engage in work that requires their mind and heart" [4].
Waseda University robotics heritage
Tokyo Robotics' roots at Waseda University connect it to one of the most significant lineages in humanoid robotics history. Waseda's robotics program traces back to the 1960s, when Professor Ichiro Kato, often called the "father of Japanese robotics research," began pursuing humanoid robot development and launched the cross-disciplinary WABOT (WAseda roBOT) Project in the 1970s [5].
In 1973, the WABOT project produced WABOT-1, the world's first full-scale anthropomorphic robot capable of walking with a quasi-dynamic gait, speaking, and grasping objects. It featured a limb control system, a vision system, and a conversation system that operated in Japanese. In 1984, WABOT-2 followed as a 50-degrees-of-freedom humanoid that could read musical scores and play an electronic keyboard [5]. This half-century of humanoid research at Waseda provided the intellectual and technical foundation on which Tokyo Robotics built the Torobo platform.
Funding and acquisition
In January 2020, Yamaha Motor announced an investment of 200 million yen (approximately $1.8 million USD at the time) in Tokyo Robotics, forming an investment and technology partnership. Yamaha intended to leverage Tokyo Robotics' strengths in collaborative robots (cobots) to expand its industrial robotics business [6].
On July 1, 2025, Yaskawa Electric Corporation acquired 100% of the shares of Tokyo Robotics, making it a wholly owned subsidiary. The acquisition amount was not disclosed. Yaskawa, founded in 1915 and headquartered in Kitakyushu, Fukuoka Prefecture, is the maker of the MOTOMAN series of industrial robots, with over 540,000 units shipped worldwide [2]. Through the acquisition, Yaskawa aimed to incorporate humanoid robotics technologies it previously lacked, shorten development timelines for advanced actuators, and achieve practical humanoid applications within a few years [2].
Design and technical specifications
Physical design
Torobo stands 1,615 mm tall with a cart width of 590 mm, giving it a size comparable to an average human. The robot weighs approximately 120 kg and is built on a 4-axis omnidirectional mobile base rather than bipedal legs, prioritizing stability and manipulation capability over walking agility. This wheeled design allows smooth movement through living and working spaces without the complexity of bipedal balance control [1].
The robot's overall design philosophy prioritizes heavy-duty manipulation over lightweight mobility. Where many humanoid platforms optimize for walking or running, Torobo's 7 kg per-arm payload at worst-case holding posture (and up to 20 kg at maximum force) makes it suited for industrial tasks that demand sustained force application [1].
Joint configuration
Torobo's 24 degrees of freedom are distributed across four main body segments:
| Body segment | Axes | Configuration |
|---|---|---|
| Dual arms | 7 per arm (14 total) | Full human-like range of motion |
| Waist | 3 | Pitch, pitch, yaw |
| Neck | 3 | Yaw, pitch, roll |
| Mobile base | 4 | Omnidirectional movement |
| Total | 24 |
The 7-axis arm configuration provides one additional degree of freedom compared to most industrial robot arms (which typically have 6), enabling Torobo to reach around obstacles and adopt postures that closely mimic human arm movements. The 3-axis waist allows the robot to lean, twist, and reach in ways that extend its effective workspace beyond what the arms alone could cover [1].
Torque sensing and force control
Torobo's distinguishing technical feature is the presence of torque sensors at all joints in the arms and waist. This comprehensive torque sensing enables several advanced control capabilities [1][7]:
- Cartesian coordinate impedance control: The robot can regulate the relationship between force and motion in three-dimensional space, allowing it to respond compliantly to external forces rather than rigidly resisting them.
- ZMP-based fall prevention: By monitoring the Zero Moment Point, the system detects when the robot is at risk of tipping and takes corrective action.
- Interference detection safety stops: If the robot encounters unexpected contact or resistance, the system can halt movement to protect both the robot and nearby humans.
- State machines for connecting movements: Complex multi-step tasks can be composed by linking individual motion primitives through programmable state machines.
This force control architecture makes Torobo particularly suitable for tasks involving active physical contact, such as assembly operations, surface wiping, hammering, and cooperative manipulation with human workers [7].
Sensor suite
Torobo's optional sensor head provides a comprehensive perception package:
| Sensor type | Description |
|---|---|
| Wide-angle stereo camera | RGB imaging for spatial awareness |
| Fisheye camera | RGB wide-field-of-view capture |
| Depth camera | Time-of-Flight (ToF) based 3D sensing |
| Stereo microphone | Audio input for voice interaction |
| Speaker | Audio output |
Computing and I/O
The robot uses a standard single onboard PC for robot control, with an optional second PC equipped with an NVIDIA RTX 4070 GPU for sensor management and AI inference tasks. External connectivity includes 8 digital input channels, 8 digital output channels, 8 analog input channels, 8 analog output channels, and 2 Ethernet ports. The tool flange provides 24V DC power and 8 general-purpose signal wires for end-effector integration [1].
Full specifications table
| Category | Specification | Value |
|---|---|---|
| Physical | Height | 1,615 mm (5 ft 4 in) |
| Physical | Cart width | 590 mm |
| Physical | Weight | ~120 kg |
| Mobility | Total degrees of freedom | 24 |
| Mobility | DOF per arm | 7 |
| Mobility | Base type | 4-axis omnidirectional |
| Manipulation | Arm reach | 680 mm |
| Manipulation | Payload (worst-case posture) | 7 kg per arm |
| Manipulation | Payload (maximum force) | 20 kg |
| Sensing | Joint sensors | Torque sensors at all arm and waist joints |
| Computing | Primary | Single onboard PC |
| Computing | Optional GPU | NVIDIA RTX 4070 |
| Power | Battery life | Up to 3 hours continuous |
| Software | Operating system | ROS-compatible |
| Simulation | Supported platforms | MuJoCo, NVIDIA Isaac Sim |
Software and simulation
Torobo's software stack is built on the Robot Operating System (ROS), providing compatibility with the broader ROS ecosystem of tools and packages. Key software capabilities include [1]:
- RViz visualization: Real-time 3D rendering of the robot's state, sensor data, and planned trajectories.
- MoveIt! trajectory planning: Automated collision-free path planning for the arms.
- Sensor information logging: Comprehensive recording of joint angles, torques, visual data, and force measurements for offline analysis and machine learning training.
Tokyo Robotics has open-sourced simulation models for Torobo that work with Google DeepMind's MuJoCo physics simulator and NVIDIA's Isaac Sim platform. These models allow researchers to develop and test control policies, reinforcement learning algorithms, and task-planning strategies in simulation before deploying them on the physical robot [1]. The company's GitHub repository contains additional code resources and model data for developers.
Torobo product ecosystem
Torobo Hand
The Torobo Hand is a multi-fingered dexterous manipulator designed for grasping research and practical manipulation tasks. Key specifications include a weight of approximately 2 kg, a grasp force of roughly 10N at each fingertip, and a 24VDC power supply. Each joint is driven by a backdrivable torque-controlled actuator, allowing the fingers to adapt to various object shapes without prior geometric knowledge by setting appropriate torque limits [8].
The hand integrates nearly 200 distributed pressure sensing points across the fingers and palm, with preinstalled pressure sensors and interchangeable fingertips. It is ROS-compatible and can be used with the Torobo humanoid platform or with third-party robot arms via an external controller [8].
Torobo Puppet
The Torobo Puppet is a scaled-down physical replica of Torobo's upper body that serves as an intuitive teleoperation interface. Because the Puppet's joint configuration and link proportions match those of the full-size robot, movements of the Puppet translate directly to corresponding movements of Torobo in real time [9].
The Puppet is available in two configurations: a stationary model that allows the operator to sit while controlling the robot, and a wearable configuration that enables free movement during tasks. A haptic feedback feature transmits vibrations to the operator when a certain level of force is applied to the robot's hands. The mobile base can be controlled through a dedicated controller attached to the Puppet's hand [9].
Torobo Eye
The Torobo Eye is a compact 3D camera system developed for robotic vision applications. It uses a structured light (active stereo) measurement method to acquire high-definition 3D images, depth images, 3D point clouds, and color images [10].
| Model | Measurement range | Sampling rate | Depth precision (std. dev.) | Weight |
|---|---|---|---|---|
| SL40 | Standard | 10 fps | 0.06 mm | Compact (palm-sized) |
| SL80 | Up to 1,200 mm | 10 fps | Similar to SL40 | ~500 g |
The SL40 was the first model, designed primarily for robot-mounted 3D bin picking applications. The SL80, released in 2022, extended the measurement range to 1,200 mm while maintaining the compact form factor. Both models can be mounted on a robot's end-effector or installed in fixed positions [10].
Tolon mobile manipulator
Tolon is a mobile manipulator designed for material handling, short-distance transport, and patrol tasks. It features an asymmetrical arm arrangement and an omnidirectional mobile base that allows it to navigate and operate in narrow spaces. Tolon is commercially available and is used alongside a Mobile Gripper product for automated warehouse operations [11].
Torobo GTC logistics solution
The Torobo GTC is a logistics solution that uses mobile manipulators to transport goods directly from shelves to cage trolleys, eliminating the need for traditional picking stations used in conventional Goods-to-Person (GTP) systems. The system supports 24-hour unmanned operation and achieves high storage efficiency by enabling direct picking from shelves approximately 3.9 meters tall [11].
Demonstrations and capabilities
Nail hammering
One of Torobo's most widely covered demonstrations showed the robot accurately hammering a nail into a piece of wood. According to Tokyo Robotics, the instantaneous rebound force from the hammer is absorbed through a combination of the elasticity of the rubber material securing the hammer, the deflection in torque sensors and harmonic gears, backdrivability, and impedance control [7]. This multi-layered force management approach illustrates how Torobo's torque-sensing architecture handles high-impact tasks that require both precision and compliance. The demonstration also included sawing wood, further showcasing the robot's ability to perform construction-oriented manual labor [7].
Autonomous cleaning with Deep Predictive Learning
In a collaboration with Waseda University's Ogata Lab, Tokyo Robotics demonstrated Torobo autonomously wiping a table surface using Deep Predictive Learning (DPL). This technique, developed at Waseda, enables the robot to anticipate and modify its movements in real time, producing smooth and coordinated actions rather than rigid pre-programmed motions [12].
The training process involved human operators remotely controlling Torobo through dozens of demonstration sessions, during which the system recorded joint angle data, visual feedback, and pressure measurements. After analyzing this teleoperated data, Torobo replicated the cleaning motions autonomously. During operation, the system visualizes its decision-making: blue dots indicate current focus points while red dots show planned next movements [12].
Teleoperation with motion capture
Torobo supports teleoperation through multiple interfaces. In addition to the Torobo Puppet, the robot can be controlled using Noitom's Perception Neuron PRO inertial motion capture system, which allows a human operator to map full-body movements onto the robot in real time. This setup provides singularity avoidance, protection against self-interference, and torque-limiting functions when the robot encounters physical constraints [13].
Bipedal prototype (2026)
On April 2, 2026, Tokyo Robotics publicly demonstrated a bipedal humanoid prototype, marking the company's entry into legged locomotion. The prototype showcased three primary capabilities [14]:
- Human-like walking gait: The robot exhibited a fluid walking cycle that mimics human joint kinematics.
- Push recovery: The machine maintained its upright posture despite external disturbances, demonstrating dynamic balance.
- Whole-body teleoperation: A human operator wearing a VR headset and motion trackers controlled the robot in real time, including complex torso and arm coordination.
The control policies were developed using large-scale parallel reinforcement learning, with engineers training these policies in physics simulators (likely MuJoCo or NVIDIA Isaac Sim) to achieve stable dynamic motions that would be extremely difficult to hand-code. The prototype's hardware retained an exposed, industrial aesthetic, indicating a focus on functional testing rather than consumer-ready design [14].
Tokyo Robotics is actively recruiting engineers specializing in whole-body control and motion tracking to accelerate the bipedal project toward autonomous task execution [14].
The Todai Robot Project (Torobo-kun)
The name "Torobo" is also associated with the Todai Robot Project, a separate but thematically related Japanese AI research initiative. While this project was not conducted by Tokyo Robotics, the shared naming reflects the broader Japanese tradition of naming AI and robotics projects with similar conventions, and the project provides important context for understanding Japan's AI and robotics research landscape.
Project overview
The Todai Robot Project (also known as "Can a Robot Get into the University of Tokyo?") was launched in fiscal year 2011 by Japan's National Institute of Informatics (NII). Led by Professor Noriko Arai, the project aimed to develop an artificial intelligence system, nicknamed Torobo-kun, capable of passing the entrance examination for the University of Tokyo (Todai), one of Asia's most prestigious universities. The target date for achieving this goal was fiscal year 2021 [15].
The project received support from Fujitsu, Nagoya University, and other institutional partners. Rather than building a physical robot, Torobo-kun was a software-based AI system that attempted Japan's standardized National Center Test and university-specific entrance exams [15].
Exam performance
Torobo-kun took mock entrance exams annually from 2013 to 2016, with mixed results across different subjects:
| Subject area | 2016 score | Notes |
|---|---|---|
| World history | 66.3% | Strong fact retrieval from databases |
| Physics | 59.0% | Improved from 46.5% in 2015 with new equation-solving capabilities |
| Mathematics (both sections) | ~60% | Consistent performance using algorithmic approaches |
| English verbal | 36.2% | Struggled with multi-sentence comprehension |
| English writing | 50.5% | Better than verbal but still below average |
| Overall | 525/950 (55.3%) | Standard score of 57.1% |
By 2015 and 2016, Torobo-kun consistently scored in the top 20% of all test-takers nationwide, achieving scores sufficient for admission to more than 70% of Japanese universities, including over 400 of the country's 579 private universities [15][16]. However, the system consistently fell short of the approximately 80% score required for University of Tokyo admission.
Limitations and project conclusion
Torobo-kun excelled at subjects that rewarded fact retrieval and mathematical calculation but struggled with tasks requiring genuine language comprehension. The AI could draw from large databases to answer knowledge-based questions and solve complex equations, but it could not comprehend multiple sentences and phrases to arrive at logical conclusions, particularly in English language tests [16].
After four years of attempts, the research team decided in late 2016 to abandon the University of Tokyo admission goal and instead redirect Torobo-kun's development toward industrial applications, focusing on improving its data extraction capabilities [16].
In a widely viewed TED Talk, Professor Arai explained that the project's true purpose was to demonstrate what AI can and cannot do. She highlighted a troubling finding: more than half of junior high school students failed to answer basic reading comprehension questions that the AI could solve through pattern-matching. This suggested that many students were relying on memorization rather than genuine understanding, making them vulnerable to being outperformed by machines in the workplace [17].
Awards and recognition
Tokyo Robotics and its products have received several notable awards:
| Award | Year | Details |
|---|---|---|
| Excellence Award (R&D category), 10th Robot Award | -- | Recognition for Torobo's research platform capabilities |
| Grand Prize, 5th IP BASE AWARD | -- | Awarded by the Japan Patent Office for intellectual property strategy |
| BEYOND AWARD 2026 | January 2026 | Awarded by Business Insider Japan under the theme "Global & Borderless" |
Research applications
Torobo serves as a platform for several significant research programs in Japan and internationally:
Japan's Moonshot R&D Program
Torobo is used in research related to Japan's government-funded Moonshot Research and Development Program, specifically Goal 3: "Realization of AI robots that autonomously learn, adapt to their environment, evolve in intelligence and act alongside human beings, by 2050." This program, funded by the Japan Science and Technology Agency and accelerated by NVIDIA AI technologies, addresses Japan's declining birthrate and aging population by developing robots that can assist with elder care, work in dangerous environments, and support daily life [18].
Academic and industrial research
The robot's torque-sensing capabilities and ROS compatibility make it attractive for academic research in force-controlled manipulation, imitation learning, and human-robot interaction. Its simulation model availability in MuJoCo and Isaac Sim enables sim-to-real transfer research, where control policies trained in simulation are deployed on the physical hardware [1].
Japanese robotics ecosystem
Torobo exists within a rich Japanese humanoid robotics ecosystem that includes both established manufacturers and emerging startups. Japan's approach to humanoid robotics in the mid-2020s has been characterized by a focus on high-precision core components and subsystems, contrasting with the full-stack, end-to-end deployment strategies pursued by companies in the United States and China [19].
Key players in Japan's humanoid robotics landscape include:
| Company/Organization | Notable robot | Focus area |
|---|---|---|
| Honda | ASIMO (retired 2022) | Pioneer in bipedal humanoid research |
| Toyota | T-HR3 | Teleoperated humanoid for partner robot research |
| Kawasaki Heavy Industries | Kaleido 9 | Disaster response; 30 kg lifting capacity |
| SoftBank Robotics | Pepper, NAO | Social and educational robotics |
| Tokyo Robotics / Yaskawa | Torobo | Force-controlled manipulation research platform |
| Waseda University | WABOT series | Academic humanoid robotics research |
The Humanoids Summit Tokyo 2026, held in May 2026, brought together companies including Harmonic Drive, Honda, Panasonic, Toyota, and dozens of international participants, positioning Tokyo as a global focal point for humanoid robotics development [20].
Japan's humanoid robot market was valued at approximately $0.22 billion USD in 2025 and is projected to grow to $3.99 billion by 2034, representing a compound annual growth rate of 43.7%. The elderly care sector is considered the most promising avenue for commercial deployment in Japan [19].
See also
- Humanoid robots
- Humanoid robot history
- Tokyo Robotics
- Yaskawa Electric
- Honda ASIMO
- Toyota T-HR3
- Robot Operating System
- Reinforcement learning
- Zero Moment Point
- Humanoid robot market
References
- Tokyo Robotics - Torobo official product page ↩
- Yaskawa Electric acquires Tokyo Robotics - Yaskawa Global ↩
- Tokyo Robotics company overview ↩
- Tokyo Robotics mission and features ↩
- Waseda University - History and Achievements of Future Robotics Organization ↩
- Yamaha Motor investment and technology partnership with Tokyo Robotics - Yamaha Motor Global News ↩
- Torobo robot hammers nail, shows potential for industrial use - Interesting Engineering ↩
- Tokyo Robotics - Torobo Hand brochure (PDF) ↩
- Tokyo Robotics - Torobo Puppet product page ↩
- Tokyo Robotics to enter vision sensor market - Seisanzai Japan ↩
- Tokyo Robotics: Transforming Warehousing with Autonomous Robots - Humanoidable ↩
- Torobo autonomous cleaning with Deep Predictive Learning - Mike Kalil ↩
- Tokyo Robotics telepresence demo with Noitom motion capture - Noitom ↩
- Tokyo Robotics steps into the bipedal arena with RL-driven humanoid - Humanoids Daily ↩
- Todai Robot Project official site ↩
- Japanese AI robot to get a real job after failing university entrance exam - DOGOnews ↩
- Noriko Arai: Can a robot pass a university entrance exam? - TED Talk ↩
- Moonshot R&D Goal 3: Coevolution of AI and robots - Japan Science and Technology Agency ↩
- Diverging humanoid robot strategies: Japan, U.S., and China - TrendForce ↩
- Global robotics industry converges on Japan for Humanoids Summit Tokyo 2026 - RoboticsTomorrow ↩
Improve this article
Add missing citations, update stale details, or suggest a clearer explanation. Every suggestion is reviewed for sourcing before it goes live.
4 revisions by 1 contributors · full history