UnderControl AI Moby
Last edited
Fact-checked
In review queue
Sources
15 citations
Revision
v4 · 3,083 words
Fact-checks are independent of edits: a reviewer re-verifies the article against its sources and stamps the date. How we verify
 | |
| Developer | Noble Machines (formerly Under Control Robotics) |
| Type | Humanoid robot |
| Country of origin | United States |
| Year unveiled | 2024 |
| First deployment | February 2025 |
| Height | 170 cm (5 ft 7 in) |
| Weight | 72 kg (159 lb) |
| Degrees of freedom | 34 |
| Payload capacity | 27 kg (60 lb) |
| Battery life | 5 hours |
| Power consumption | 200 W (average) |
| Walking speed | 0.83 m/s (3.0 km/h) |
| Computing | NVIDIA Jetson Orin |
| Operating system | Linux / ROS |
| Status | Commercially deployed |
| Price | ~$75,000 USD (estimated) |
| Website | noblemachines.ai |
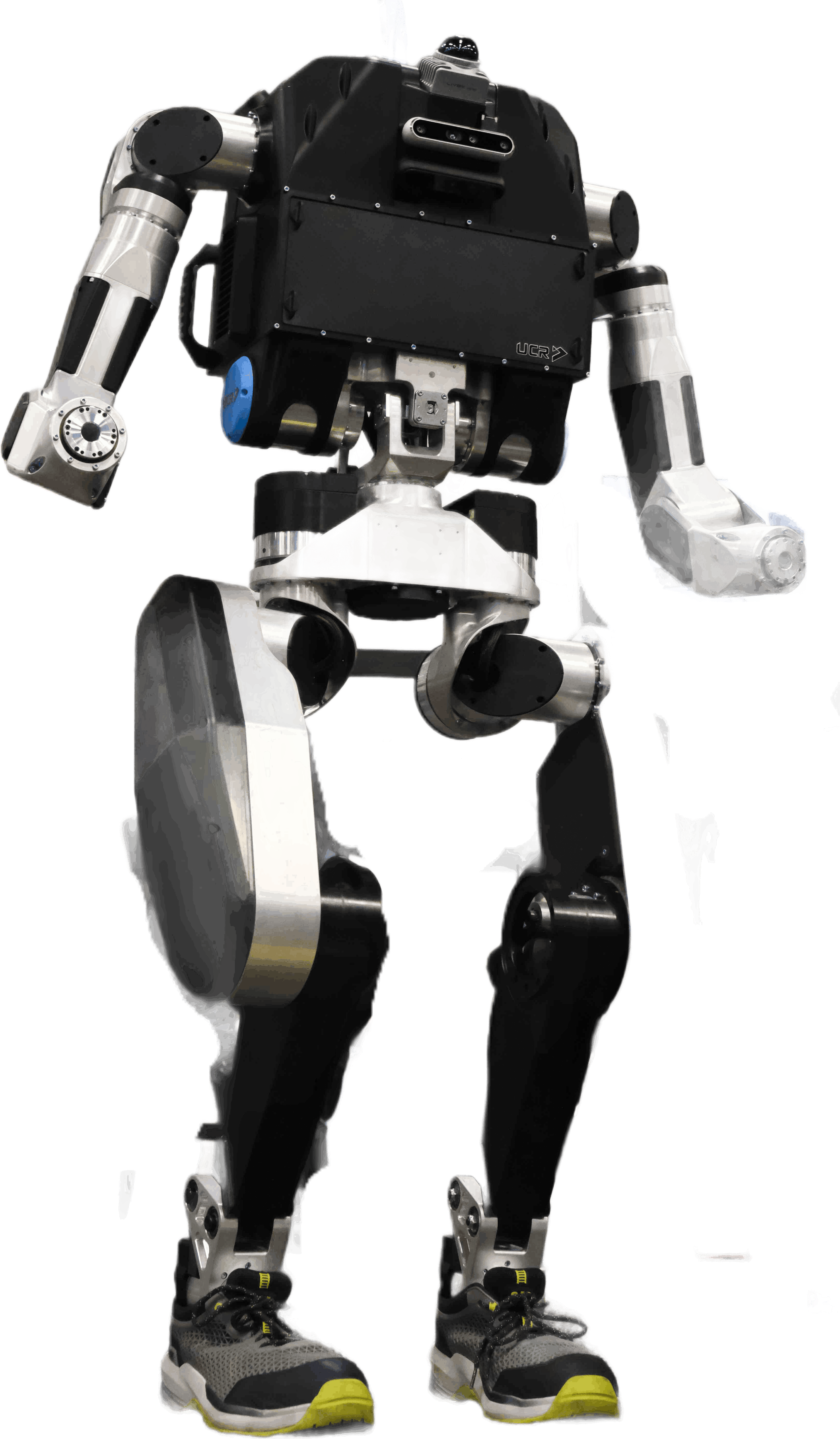
Moby is a general-purpose industrial humanoid robot developed by Noble Machines (formerly Under Control Robotics, or UCR), a robotics startup based in Sunnyvale, California. Designed for physically demanding and hazardous work environments, Moby prioritizes functional mobility, payload capacity, and durability over human-like aesthetics. The robot stands 170 cm tall, weighs 72 kg, and can lift up to 27 kg (60 lb) while navigating stairs, scaffolding, steep inclines, and cluttered industrial terrain.
Noble Machines emerged from stealth on March 3, 2026, announcing that it had shipped and deployed Moby robots to a Fortune Global 500 customer within 18 months of the company's founding.[1][2] The company was established in 2024 by a team of engineers with backgrounds at Apple, SpaceX, NASA, and Caltech. Moby runs on the NVIDIA Jetson Orin edge AI platform and employs a whole-body AI control system trained through simulation and real-world reinforcement loops, achieving a reported 95% sim-to-real deployment success rate.[3]
Company background
Founding and team
Noble Machines, originally incorporated as Under Control Robotics Inc., was founded in 2024 by four co-founders whose combined experience spans humanoid robotics research, space systems engineering, consumer electronics, and machine learning.[4][5]
| Co-founder | Role | Background |
|---|---|---|
| Wei Ding | Co-founder, CEO | Approximately 7 years at Apple SPG; expertise in robotics decision-making and software architecture |
| Wen-Loong (Wenlong) Ma | Co-founder, CTO | Ph.D. in bipedal locomotion at Caltech; developed controllers for the Cassie bipedal robot; contributed to research on running humanoid robots |
| Christopher McQuin | Co-founder | Former NASA JPL Member of Technical Staff; worked on the Robonaut 2 humanoid robot for the ISS; MIT Aeronautics and Astronautics graduate; former USAF Lieutenant |
| Wenda Wang | Co-founder | 2015 CMU MRSD alumnus; approximately 8 years as ML engineer at Apple SPG; Founder Fellow at South Park Commons |
Wei Ding and Wenda Wang worked together at Apple for roughly seven years before leaving to pursue robotics.[5] Wenlong Ma had been conducting humanoid locomotion research at Caltech before the field gained mainstream commercial attention, publishing work on dynamic walking controllers for the Cassie bipedal robot alongside Aaron D. Ames in the AMBER Lab.[6][7] Christopher McQuin brought extensive experience in robotic systems engineering from NASA's Jet Propulsion Laboratory, where he managed the ATHLETE rover project and worked on the Robonaut 2 humanoid robot deployed to the International Space Station.[8]
The four co-founders built their first functional humanoid prototype within four months while participating in the South Park Commons incubation program, working out of a small 80-square-meter laboratory.[5][9]
Incubation and rebranding
The company operated under the name Under Control Robotics (UCR) during its initial development phase and participated in the South Park Commons program, which provided incubation support and community.[10] By 2026, the company rebranded to Noble Machines ahead of its public launch. The original website at undercontrol.ai now redirects to noblemachines.ai.[1]
Partnerships
Noble Machines has established partnerships with several technology and industrial companies to support Moby's deployment and development.
| Partner | Collaboration area | |---|---|---| | NVIDIA | Isaac GR00T, Isaac Lab, Isaac Sim, Jetson Orin computing platform | | ADLINK | Edge computing infrastructure | | Schaeffler | Motion technology and humanoid robotics components | | Solomon | Factory floor integration and machine vision | | Teague | Industrial design of the Moby platform |
Ethan Chen, General Manager of Edge Computing at ADLINK, stated that "Noble Machines' leadership in fully integrated AI-Driven Whole-Body Control is undeniable."[1] Schaeffler, a major motion technology firm that is also active in humanoid robotics development more broadly, collaborates with Noble Machines on enhancing safety in demanding industrial operations.[1]
Design philosophy
The "anti-human" approach
Noble Machines has publicly described its design philosophy as an "anti-human" approach to industrial humanoids.[11] Rather than attempting to replicate human appearance and movement patterns, the company prioritizes what it calls "application-essential performance." The company has stated: "While human-like motions, such as lateral torso sway, occasionally emerge as natural consequences of optimizing for energy efficiency, they are not the primary goal."[11]
Moby features a minimalistic, headless design focused on utility and ruggedness. The robot does not have a face, head-mounted display, or any cosmetic features intended to make it resemble a human being. This stands in contrast to robots such as Engineered Arts' Ameca or Tesla's Optimus, which incorporate human-like faces and proportions.
Industrial design by Teague
The external form and visual language of Moby were designed by Teague, a design consultancy known for its work in aviation, consumer electronics, and transportation. Teague's approach deliberately minimized anthropomorphic features to position the robot as "a smart and flexible tool, not a co-worker," a framing intended to reinforce acceptance on industrial job sites.[12]
The design draws visual inspiration from professional rescue equipment, using authentic materials and finishes to convey durability. Specific design elements include textured grip areas, high-visibility handles, exposed fasteners for what Teague described as "honest assembly," and protective housing for sensors and delicate components.[12] Lidar and sensor placement was optimized for both coverage and protection. Contrasting color zones and treaded surfaces signal how the robot should be handled and interacted with physically.
Teague noted that it used generative AI tools during the design process to accelerate iteration and explore novel configurations faster than traditional industrial design methods.[12]
Target applications
Moby is designed for what the company calls "4D jobs": dull, dirty, dangerous, and declining. These are roles in industries where human workers face physical risk, repetitive strain, or hazardous exposure.[3][11] Target sectors include:
- Construction: Navigating scaffolding, carrying materials across uneven terrain, performing inspections
- Mining: Operating in confined spaces with debris and poor air quality
- Energy: Inspecting infrastructure in hazardous locations such as oil rigs, power plants, and wind turbines
- Manufacturing: Material handling, sorting, and repetitive assembly tasks
- Logistics: Warehouse operations in cluttered or multi-level facilities
- Semiconductor: Cleanroom and fabrication facility support
Co-founder and CEO Wei Ding has stated: "Our customers are rethinking operations in this new era enabled by AI and general-purpose robots."[1]
Technical specifications
Physical characteristics
Moby stands approximately 170 cm (5 ft 7 in) tall and weighs 72 kg (159 lb). The frame is constructed from a combination of composite polymer and aluminum, balancing structural strength with weight reduction. The robot has 34 degrees of freedom distributed across its body, including 10 degrees of freedom per hand with five-fingered dexterous manipulators designed for tool use and object handling.[3][13]
Detailed specifications
| Category | Parameter | Value |
|---|---|---|
| Physical | Height | 170 cm (5 ft 7 in) |
| Physical | Weight | 72 kg (159 lb) |
| Physical | Material | Composite polymer + aluminum |
| Physical | IP rating | IP20 |
| Mobility | Degrees of freedom (total) | 34 |
| Mobility | DOF per hand | 10 |
| Mobility | Max walking speed | 0.83 m/s (3.0 km/h, 1.9 mph) |
| Mobility | Locomotion type | Bipedal, omnidirectional |
| Mobility | Terrain capability | Stairs, scaffolding, inclines, cross-slopes, debris |
| Manipulation | Arm payload | 4.5 kg per arm |
| Manipulation | Total payload capacity | 27 kg (60 lb) |
| Manipulation | Fingers per hand | 5 |
| Power | Battery life | 5 hours (typical shift) |
| Power | Average power consumption | 200 W |
| Computing | Onboard processor | NVIDIA Jetson Orin |
| Computing | LLM integration | Yes |
| Computing | Operating system | Linux / Ubuntu / ROS |
| Actuators | Motor type | Brushless DC motors |
| Actuators | Gear technology | Harmonic + planetary drives |
| Connectivity | Wireless | Bluetooth, WiFi |
| Connectivity | ROS compatible | Yes |
| Teleoperation | Remote control | Yes (tele-operable for expert intervention) |
Power system
Moby operates at an average power consumption of roughly 200 W, which the company compares to the energy draw of a household television set.[3] This low power budget enables the robot to sustain 5- to 6-hour operational shifts on a single battery charge. The power efficiency is notable given the robot's 72 kg mass and 27 kg payload capacity, and it reflects design choices in actuator selection and gait optimization that prioritize energy economy over speed.
Locomotion
Moby uses bipedal locomotion with omnidirectional walking capability. The robot can walk forward, backward, and laterally; navigate across unstructured debris-filled floors; fit through tight passageways; climb steep inclines; walk cross-slope on angled surfaces; and reject physical disturbances while maintaining balance.[3] Early prototypes demonstrated walking using only an inexpensive inertial measurement unit (IMU), the same type of sensor found in smartphones for detecting orientation, without relying on more expensive sensor arrays.[14]
The locomotion system was developed using reinforcement learning in simulation, then transferred to the physical robot through a proprietary sim-to-real pipeline built on the NVIDIA Isaac platform.
Manipulation
Each of Moby's hands has five fingers with 10 degrees of freedom, designed for grasping tools, turning handles, carrying objects, and performing manipulation tasks common in industrial settings. The arm payload capacity is 4.5 kg per arm, while the total payload capacity (including carrying loads against the body or using both arms in coordination) reaches 27 kg (60 lb).[13]
AI and software architecture
Whole-body AI control
Moby's core control system is described by Noble Machines as "AI-Driven Whole-Body Control," a system that coordinates locomotion, manipulation, and balance simultaneously rather than treating them as separate subsystems.[1][3] This approach allows the robot to walk while carrying a heavy load, adjust its gait when terrain changes underfoot, and maintain stability during manipulation tasks, all without requiring explicit mode switching.
The AI stack runs on an NVIDIA Jetson Orin edge AI computer, with models trained through a combination of simulation and real-world reinforcement loops. Noble Machines reports a 95% deployment success rate for its sim-to-real transfer pipeline.[11]
NVIDIA Isaac platform integration
Noble Machines built a proprietary training pipeline leveraging multiple components of the NVIDIA Isaac robotics ecosystem.[3]
| NVIDIA Component | Function in Moby's development | |---|---|---| | Isaac GR00T | Synthetic data generation for motion and manipulation training | | Isaac Lab | Reinforcement learning environment for policy training | | Isaac Sim | High-fidelity physics simulation for testing | | Jetson Orin | Onboard edge AI computer powering all real-time software | | X-Mobility | End-to-end navigation model for world modeling | | CUDA | GPU-to-edge deployment enabling seamless model transfer |
Four-gap training framework
Noble Machines developed a structured training methodology they call the "four-gap framework" to systematically address the challenges of transferring robot behaviors from simulation to the real world.[3]
Real-to-sim (Real2Sim): Custom neural networks embed real-world actuator dynamics into simulation using data collected from dynamometer testing and plyometric training exercises on the physical hardware. This ensures the simulated robot behaves like the physical one at the actuator level.
Sim-to-sim (Sim2Sim): Comprehensive evaluation across multiple simulation platforms prevents policies from exploiting quirks ("local optima") in any single simulator's physics engine.
Sim-to-real (Sim2Real): Integration of input and output memory into policy networks enables dynamic adaptation to real-world conditions. Single end-to-end neural networks handle state estimation, perception, and control simultaneously, achieving the reported 95% deployment success rate.
Real-to-real (Real2Real): Continuous evaluation across hardware variations establishes operational boundaries, ensuring consistent performance even when components come from different suppliers or environmental conditions change.
Autonomous capabilities
Moby's AI system enables several autonomous capabilities without requiring explicit programming for each scenario.[3]
- Terrain geometry identification: The robot automatically detects and adapts to different surface types, inclines, and obstacles.
- Payload estimation: Moby estimates the mass and inertia of objects it carries and adjusts its gait and balance accordingly.
- Motor characteristic learning: The system learns the performance characteristics of its own motors over time, compensating for wear or variation.
- Dynamic environmental adaptation: The robot responds to changing conditions (surface friction, slopes, wind, disturbances) in real time without requiring parameter tuning.
Rapid skill acquisition
One of Noble Machines' central claims is that Moby can learn new real-world skills in hours rather than months.[1] The system supports multiple learning modalities:
- Language-based instructions: Operators can describe tasks using natural language, and the robot translates these into action sequences.
- Physical demonstrations: Human operators can physically guide the robot through tasks, which are then generalized into reusable behaviors.
- Gesture-based teaching: Workers can use gestures to direct the robot's attention and actions.
This multi-modal learning approach is designed to make Moby accessible to industrial workers who are not robotics engineers, lowering the barrier to deployment in new task domains.
Development timeline
| Date | Milestone | |---|---|---| | 2024 | Under Control Robotics founded by Wei Ding, Wenlong Ma, Christopher McQuin, and Wenda Wang | | 2024 (within 4 months) | First functional humanoid prototype completed at South Park Commons | | September 23, 2024 | First public demonstration of Moby | | February 12, 2025 | First field deployment | | 2025 | Development of next-generation robot with enhanced manipulation capabilities | | March 3, 2026 | Noble Machines emerges from stealth; announces Fortune Global 500 deployment | | March 2026 | Live demonstrations at NVIDIA GTC 2026 (Booths #3303 and #941) |
GTC 2026 demonstration
At NVIDIA GTC 2026, Noble Machines showcased Moby performing autonomous, end-to-end loco-manipulation tasks in real time.[15] The company brought four booths, set up three Moby robots, and ran two fully autonomous live showcases simultaneously across two booth locations for the duration of the conference. Co-founder Wenda Wang noted that the demonstration highlighted Moby's ability to combine walking and manipulation in a single continuous workflow, a capability that remains challenging for many humanoid platforms.
Competitive landscape
Moby competes in a rapidly growing market for industrial humanoid robots, though it occupies a distinct niche with its emphasis on ruggedness, heavy payload capacity, and hazardous environment operation rather than general-purpose dexterity or consumer applications.
| Company | Robot | Focus | Payload | Key differentiator |
|---|---|---|---|---|
| Noble Machines | Moby | Heavy industry, hazardous environments | 27 kg | Rugged design, 4D jobs, low power consumption |
| Figure AI | Figure 02 / 03 | Manufacturing, logistics | 20 kg | Helix VLA, BMW deployment, high-volume manufacturing |
| Tesla | Optimus | Factory automation, consumer | Not disclosed | Target price $20,000-$30,000, Tesla ecosystem |
| Boston Dynamics | Atlas (electric) | Research, industry | 50 kg | 56 DOF, Hyundai backing, most advanced demos |
| Agility Robotics | Digit | Logistics, warehousing | 16 kg | Purpose-built for logistics, Amazon pilot |
| Apptronik | Apollo | Manufacturing, logistics | 25 kg | Mercedes-Benz partnership, modular design |
| Unitree Robotics | H1 / G1 | Research, general purpose | 3-5 kg | Low cost, open ecosystem |
| Sanctuary AI | Phoenix | General purpose | Not disclosed | Carbon (proprietary AI), dexterous hands |
Noble Machines differentiates itself from competitors primarily through its focus on hazardous, heavy-payload industrial applications. While companies like Figure AI and Agility Robotics target relatively controlled factory and warehouse environments, Moby is engineered for construction sites, mining operations, and energy infrastructure where terrain is unpredictable, conditions are harsh, and payloads are heavy. The company's 200 W average power consumption is also notably low compared to many competitors, enabling longer operational shifts.
The headless, tool-like design philosophy stands in contrast to competitors that invest in human-like appearance. Noble Machines argues this approach is better suited to industrial acceptance, where workers are more comfortable with a machine that looks like a tool than one that resembles a person.
Future development
Noble Machines has indicated plans to release a next-generation robot with enhanced manipulation capabilities. As of the company's Substack blog post from late 2025, the next-generation system was described as being near completion, building on Moby's proven locomotion platform with improved dexterous manipulation for a wider range of industrial tasks.[3] The company's approach of validating AI and robotic systems in real industrial operations before scaling deployments suggests a measured expansion strategy.
The company operates on the stated belief that "AI must prove itself in real industrial operations before it scales," positioning Noble Machines as a company that prioritizes deployment reliability over rapid feature expansion.[1]
See also
- Humanoid robot
- Humanoid robots
- Noble Machines
- NVIDIA
- Reinforcement learning
- Robot Operating System
- NASA Valkyrie
- Sim-to-real transfer
References
- "Noble Machines Emerges from Stealth, Ships and Deploys General-Purpose Robots for Industry's Toughest Jobs." BusinessWire, March 3, 2026. https://www.businesswire.com/news/home/20260303533339/en/Noble-Machines-Emerges-from-Stealth-Ships-and-Deploys-General-Purpose-Robots-for-Industrys-Toughest-Jobs ↩
- "Noble Machines exits stealth with Moby humanoid." The Robot Report, March 2026. https://www.therobotreport.com/noble-machines-exits-stealth-with-moby-humanoid/ ↩
- "Real-World World-building: UCR Develops Versatile AI-Driven Robots for Heavy Industries built on the NVIDIA Isaac Platform." Noble Machines Blog (Substack). https://undercontrolrobotics.substack.com/p/real-world-world-building-ucr-develops ↩
- "Interview with Under Control Robotics (UCR)." MRSD Newsletter, Carnegie Mellon University. https://labs.ri.cmu.edu/mrsd-news/interview-with-under-control-robotics-ucr/ ↩
- "Noble Machines." South Park Commons. https://www.southparkcommons.com/companies/under-control-robotics ↩
- Reher, J., Ma, W.-L., and Ames, A. D. "Dynamic Walking with Compliance on a Cassie Bipedal Robot." Caltech AMBER Lab. http://ames.caltech.edu/reher2019dynamic.pdf ↩
- "Wen-Loong Ma." LinkedIn. https://www.linkedin.com/in/wen-loong-ma-0314b845/ ↩
- "Christopher McQuin." JPL Robotics. https://www-robotics.jpl.nasa.gov/who-we-are/people/christopher_mcquin/ ↩
- "The Humanoid Hub visits UCR's lab in Santa Clara." X (formerly Twitter), February 4, 2025. https://x.com/TheHumanoidHub/status/1886802761909764529 ↩
- "Under Control Robotics Inc." Portal of Robotics and Artificial Intelligence. https://pr.ai/threads/under-control-robotics-inc-robotics-santa-clara-california-usa.26164/ ↩
- "Noble Machines Exits Stealth: The 'Anti-Human' Approach to Industrial Humanoids." Humanoids Daily, March 2026. https://www.humanoidsdaily.com/news/noble-machines-exits-stealth-the-anti-human-approach-to-industrial-humanoids ↩
- "Under Control Robotics." Teague Design. https://teague.com/work/under-control-robotics ↩
- "Moby." Portal of Robotics and Artificial Intelligence. https://pr.ai/threads/moby-humanoid-robot-under-control-robotics-inc-santa-clara-california-usa.26165/ ↩
- "Ex-SpaceX, Apple engineers deploy industrial robots in just 18 months." Interesting Engineering, March 2026. https://interestingengineering.com/ai-robotics/noble-machines-industrial-robot-record-deployment ↩
- "Moby Demonstrates Autonomous Loco-Manipulation at GTC." Wenda Wang, LinkedIn, March 2026. https://www.linkedin.com/posts/wendaw_we-are-thrilled-to-demonstrate-mobys-latest-activity-7435411959929499648-Sj9d ↩
Improve this article
Add missing citations, update stale details, or suggest a clearer explanation. Every suggestion is reviewed for sourcing before it goes live.
3 revisions by 1 contributors · full history