CASIVIBOT
Last edited
Fact-checked
In review queue
Sources
11 citations
Revision
v7 · 2,141 words
Fact-checks are independent of edits: a reviewer re-verifies the article against its sources and stamps the date. How we verify
| CASIVIBOT | |
|---|---|
 | |
| General information | |
| Manufacturer | CASIVISION (Zhongke Huiyuan Vision Technology (Luoyang) Co., Ltd.) |
| Type | Industrial embodied quality inspection robot |
| Country of origin | China (Luoyang, Henan) |
| Unveiled | August 19, 2025 |
| Mass production | June 2026 |
| Status | In mass production |
| Applications | Automated optical inspection, industrial quality control |
| Business model | Quality-inspection-robot-as-a-service (rental) |
| Website | casivision.com |
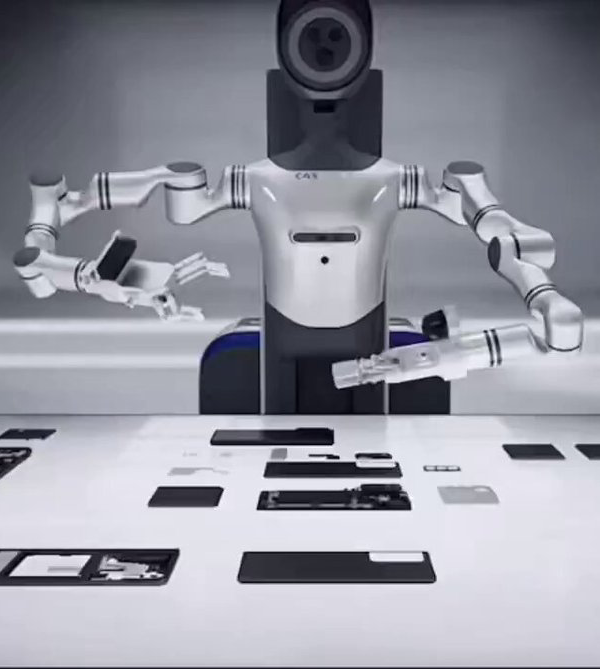
CASIVIBOT is China's first industrial embodied quality inspection robot, developed by CASIVISION (Zhongke Huiyuan Vision Technology (Luoyang) Co., Ltd.), an automated optical inspection (AOI) equipment maker incubated by the Chinese Academy of Sciences Institute of Automation. Publicly unveiled on August 19, 2025 and moved into mass production in June 2026, CASIVIBOT pairs multi-degree-of-freedom humanoid dual arms and a multi-spectral camera "head" with a vertical-industry large model, letting it autonomously move to a workpiece, pick it up, and scan it for surface defects at micrometer-level precision without fixed tooling.[1][3][5]
Not to be confused with Lingbao CASBOT. CASIVIBOT's maker, CASIVISION (Zhongke Huiyuan, 中科慧远, based in Luoyang, Henan), is a separate company from Lingbao CASBOT (Zhongke Huiling, 中科慧灵, based in Beijing), a general-purpose humanoid robot maker. The two firms have similar Chinese names and collaborated on CASIVIBOT's embodied design and toolchain, but CASIVISION is a machine-vision inspection specialist, not a full-body humanoid manufacturer. CASIVIBOT is an industrial inspection system, not a healthcare or hospitality service robot.[3][4]
What is CASIVIBOT?
CASIVIBOT is an embodied AI system built for industrial quality control. A conventional AOI machine is a fixed station into which a part must be fed; CASIVIBOT instead moves to the part and manipulates it. It navigates to a workpiece, grasps it with an anthropomorphic gripper, turns it under a camera array, and decides whether the part passes, then can sort or route it accordingly. CASIVISION frames this as a shift from "passive detection" to "active perception," and positions the robot as the start of a "3.0 era" of industrial inspection defined by embodied intelligence and ecosystem coordination.[1][11]
The company describes CASIVIBOT as "an upgrade, not a replacement" for existing AOI lines. The robot targets the flexible, high-mix, low-volume inspection tasks that rigid fixed-rule AOI stations handle poorly, while traditional AOI continues to serve high-volume standardized runs. Because CASIVIBOT learns from real-time feedback and dynamically adjusts its detection strategy for small-batch, multi-model production, CASIVISION describes it as getting "smarter with each use," a closed-loop system that improves as it operates rather than degrading against a fixed rule set.[1][2][3]
Who makes CASIVIBOT?
CASIVIBOT is made by CASIVISION, the English brand of Zhongke Huiyuan Vision Technology (Luoyang) Co., Ltd. The company was founded in 2016 and was incubated by the Chinese Academy of Sciences Institute of Automation, one of China's leading robotics and AI research institutes. It is recognized as a national high-tech enterprise and a national-level "specialized, refined, and innovative little giant" (专精特新小巨人) company.[2][7][8]
CASIVISION was founded by Dr. Zhang Zhengtao, a specially appointed core researcher at the Chinese Academy of Sciences Institute of Automation and director of its Industrial Vision Intelligent Equipment Technology Engineering Laboratory. Zhang was the first in the industry to propose a bright-and-dark-field fusion imaging method and defect-recognition algorithms suited to transparent, reflective materials, and used them to build a leading cover-glass inspection system. His flagship product, an automated inspection instrument for smartphone cover glass, can inspect one piece of cover glass in about 1.5 seconds, more than 20 times faster than a human inspector; the Chinese Academy of Sciences reported the AOI equipment ran roughly 21 times more efficiently than manual inspection.[8][9]
Under Zhang, CASIVISION grew from a three-person team into a company of around 500 employees, became the only domestic supplier able to offer a complete equipment-to-service solution for cover-glass inspection, and reached what Chinese startup media described as the world's leading position in that niche, with company valuation rising roughly tenfold over three years.[10] Over nine years, CASIVISION shipped more than 1,000 AOI devices across computer vision inspection deployments in 3C electronics, traditional home furnishings, automobiles, and semiconductors, and accumulated a defect dataset numbering in the millions of annotated samples, which became the training foundation for CASIVIBOT.[2][3]
How does CASIVIBOT work?
CASIVIBOT is built around a "hand-eye-brain" (眼手脑) integrated architecture that runs a full perception-decision-execution-feedback closed loop. Each part of the architecture corresponds to a distinct subsystem.[3][4]
The "eye" is a multi-spectral imaging system with three camera groups that combines wide-field scanning with micrometer-level defect detection. It is designed to handle varied materials, complex curved surfaces, and highly reflective workpieces that defeat single-camera or fixed-angle inspection, and it can perform 360-degree scanning of a part.[3][5]
The "hand" is a pair of anthropomorphic dual arms with interchangeable intelligent grippers. Chinese coverage of the mass-production milestone describes the robot's arms as offering seven degrees of freedom in a human-like configuration, mounted on a mobile base so the robot can approach and reposition parts. Trajectory-planning algorithms give the arms autonomous obstacle avoidance and path adjustment, letting the robot adaptively grasp complex curved workpieces and present them to the cameras.[3][6][7]
The "brain" is CASIVISION's proprietary Huinao (慧脑, "wisdom brain") AI platform. It runs vertical-industry large models trained on the company's million-scale annotated defect dataset, supports small-sample cross-category transfer learning so that new part types can be onboarded from only a few examples, and performs multi-modal fusion detection that combines vision with language-guided recognition. In effect, an operator can describe a defect in natural language and the system applies that criterion to what it sees, making CASIVIBOT one of the first inspection systems to bring large language model reasoning to the shop floor.[3][4]
What are the Jianxi, Jianxin, and Jianyun platforms?
CASIVIBOT is supported by three software platforms that CASIVISION unveiled alongside the robot. Together they cover teaching the robot, powering its recognition, and scaling it across a fleet.[3][4]
| Platform | Chinese name | Role |
|---|---|---|
| Jianxi | 鉴习 | Structures and formalizes the actions and know-how of expert human inspectors into replicable machine routines (for example, checking a phone back cover for scratches under a specific lighting angle) |
| Jianxin | 鉴心 | The vertical-industry large-model engine that delivers high-precision recognition from minimal training samples |
| Jianyun | 鉴云 | A cloud inspection hub enabling "train once, deploy across the fleet," remote optimization, and task synchronization |
The Jianxin platform is CASIVISION's headline AI result: it won first place in the industrial vision challenge at CVPR 2025, one of the field's top computer vision conferences. The Jianyun cloud layer means that when one CASIVIBOT learns a new inspection task, the updated model can be pushed to every other unit, so an entire deployed fleet improves together rather than each robot being trained in isolation.[3][4]
What are CASIVIBOT's technical specifications?
| Category | Specification |
|---|---|
| Type | Industrial embodied quality inspection robot |
| Form factor | Humanoid dual-arm upper body on a mobile base |
| Arms | Two anthropomorphic seven-degree-of-freedom arms with interchangeable grippers |
| Vision ("eye") | Multi-spectral imaging, three camera groups; wide-field scanning plus micrometer-level defect detection; 360-degree coverage |
| AI ("brain") | Proprietary Huinao platform; vertical-industry large model; million-scale annotated defect dataset |
| Detection precision | Micrometer level |
| Inspection speed | Under 5 seconds per part (automotive motor stator demonstration) |
| Mobility | Mobile base with autonomous obstacle avoidance and path planning |
| Software | Jianxi (teaching), Jianxin (large-model engine), Jianyun (cloud) |
| Learning | Small-sample cross-category transfer learning; continuous closed-loop improvement |
| Modularity | Interchangeable arms, grippers, vision configuration, and algorithm modules |
| Target industries | 3C electronics, automotive, new energy, semiconductors, home appliances |
| Unveiled | August 19, 2025 |
| Mass production | June 2026 (Luoyang) |
These figures come from CASIVISION's launch materials and Chinese press coverage of the launch and mass-production milestones. CASIVISION has not published a unit price; the robot is offered primarily through a rental, or "quality-inspection-robot-as-a-service," model rather than as a fixed hardware purchase.[2][3][5]
What can CASIVIBOT do?
At its August 2025 launch, CASIVISION demonstrated CASIVIBOT on several representative tasks that highlight its combination of manipulation, vision, and reasoning.[3][4]
- Bottle label inspection. Using coordinated dual-arm motion, the robot rotates a cylindrical bottle to achieve 360-degree coverage of the label, checking for print and placement defects that a single fixed camera cannot fully see.
- Automotive motor stator inspection. The robot detects micro-cracks and burrs on electric motor stators, completing a single-piece inspection in under five seconds with no human intervention.
- Smartphone cover and back-cover inspection. Building on CASIVISION's core AOI expertise, the robot inspects phone covers for scratches and surface defects, mimicking the viewing angles a skilled human inspector would use under controlled lighting.
Because its arms, grippers, vision configuration, and algorithm modules are all modular and interchangeable, a single CASIVIBOT can be reconfigured for a new product line without a full hardware redesign, which CASIVISION says extends device lifecycle and lowers the cost of switching between products.[3]
How is CASIVIBOT different from traditional AOI?
Traditional automated optical inspection stations are fixed, single-purpose machines programmed with rigid rules for a specific part on a specific line. They excel at high-volume, standardized production but struggle with the small-batch, high-mix manufacturing that is increasingly common, and they typically require costly reprogramming or new fixtures whenever the product changes.[1][3]
CASIVIBOT is designed to close that gap. Its mobile, dual-arm body lets it handle parts of different shapes and orientations; its vertical-industry large model recognizes defects from only a few examples rather than exhaustively hand-coded rules; and its closed-loop learning means detection accuracy improves as it runs. CASIVISION reports that CASIVIBOT achieves error and miss rates far below manual inspection while supporting rapid adaptation to new part types and 24/7 continuous operation, moving quality control from "passive detection" toward "active perception."[5][6][7]
What industries use CASIVIBOT, and when did it enter production?
CASIVIBOT entered mass production in Luoyang on June 16, 2026, an event Chinese state media covered as the mass production of the country's first industrial embodied quality inspection robot. At that milestone CASIVISION reported that it had already shipped more than 30 units across four industrial application scenarios and expected shipments to exceed 100 units within the year.[5][6]
The robot is aimed at flexible-manufacturing quality inspection across sectors including 3C electronics, automotive and new-energy vehicles, semiconductors, and home appliances. Early deployments have concentrated in electric motor manufacturing, hard cutting tools, and precision components, serving multiple industry leaders. These are all domains where parts have complex geometry, defects are subtle, and production runs are varied enough to make fixed AOI lines expensive to maintain.[6][7][11]
Quality inspection robot as a service
A notable part of CASIVIBOT's strategy is its business model. Rather than selling inspection hardware outright, CASIVISION positions CASIVIBOT for a rental, or "robot as a service," arrangement in which manufacturers pay to use the robot and its cloud-updated models. The company argues this shifts industrial quality inspection from a large upfront hardware purchase to an operating expense, lowering the barrier for small and medium-sized enterprises to adopt AI-driven inspection and letting them benefit from fleet-wide model improvements delivered through the Jianyun cloud platform.[2][3]
Partnerships and ecosystem
At the CASIVIBOT launch, CASIVISION launched a global partner recruitment program organized around three pillars: technology development, scenario implementation, and channel partnerships. General manager Zhang Wujie framed the effort around industry collaboration, saying the company aims to "break through the boundaries of traditional AOI equipment" and describing the future of intelligent inspection as "not a solo dance by any single company, but a dance shared across the industry."[3][4]
As part of building the robot's embodied capabilities, CASIVISION collaborated with the Lingbao CASBOT team on embodied design and toolchain development. This cooperation, between two firms with similar Chinese names but different specialties, is the likely source of frequent confusion between CASIVIBOT and CASBOT's general-purpose humanoids; the robots are distinct products from distinct companies.[3][4]
See also
- Embodied AI
- Computer vision
- Industrial robot
- Humanoid robots
- Lingbao CASBOT
- Large language model
- Transfer learning
- CVPR
References
- "中科慧远将发布首款工业具身质检机器人CASIVIBOT 开启智能质检新飞跃." China Daily (tech.chinadaily.com.cn), August 15, 2025. ↩
- "中科慧远发布CASIVIBOT,以九年积累开启AOI与机器人协同的品质检测新时代." QbitAI (量子位), August 2025. ↩
- "中科慧远重磅发布质检机器人CASIVIBOT 开启具身智能质检新时代." GeekPark (极客公园), August 2025. ↩
- "智检未来 触手可及: CASIVIBOT工业质检机器人震撼发布." TechNode (动点科技), August 2025. ↩
- "国内首款工业具身质检机器人洛阳量产." Xinhua Net Henan, June 21, 2026. ↩
- "国内首款工业具身质检机器人洛阳量产." CNR (央广网), June 21, 2026. ↩
- "中科慧远具身质检机器人实现量产." Sohu, June 2026. ↩
- "由中科院自动化研究所孵化,「中科慧远」已批量出货手机玻璃盖板外观检测设备." 36Kr. ↩
- "张正涛." Chinese Academy of Sciences Institute of Automation (ia.cas.cn). ↩
- "3年估值翻10倍,中科慧远登上工业外观检测界珠穆朗玛峰丨创业邦100." Cyzone (创业邦). ↩
- "A Luoyang-based company has unveiled CASIVIBOT, an AI-powered inspection robot for manufacturing." Luoyang International Communication Center, September 2025. ↩
Improve this article
Add missing citations, update stale details, or suggest a clearer explanation. Every suggestion is reviewed for sourcing before it goes live.
6 revisions by 1 contributors · full history