Reachy 2
Last edited
Fact-checked
In review queue
Sources
20 citations
Revision
v6 · 4,351 words
Fact-checks are independent of edits: a reviewer re-verifies the article against its sources and stamps the date. How we verify
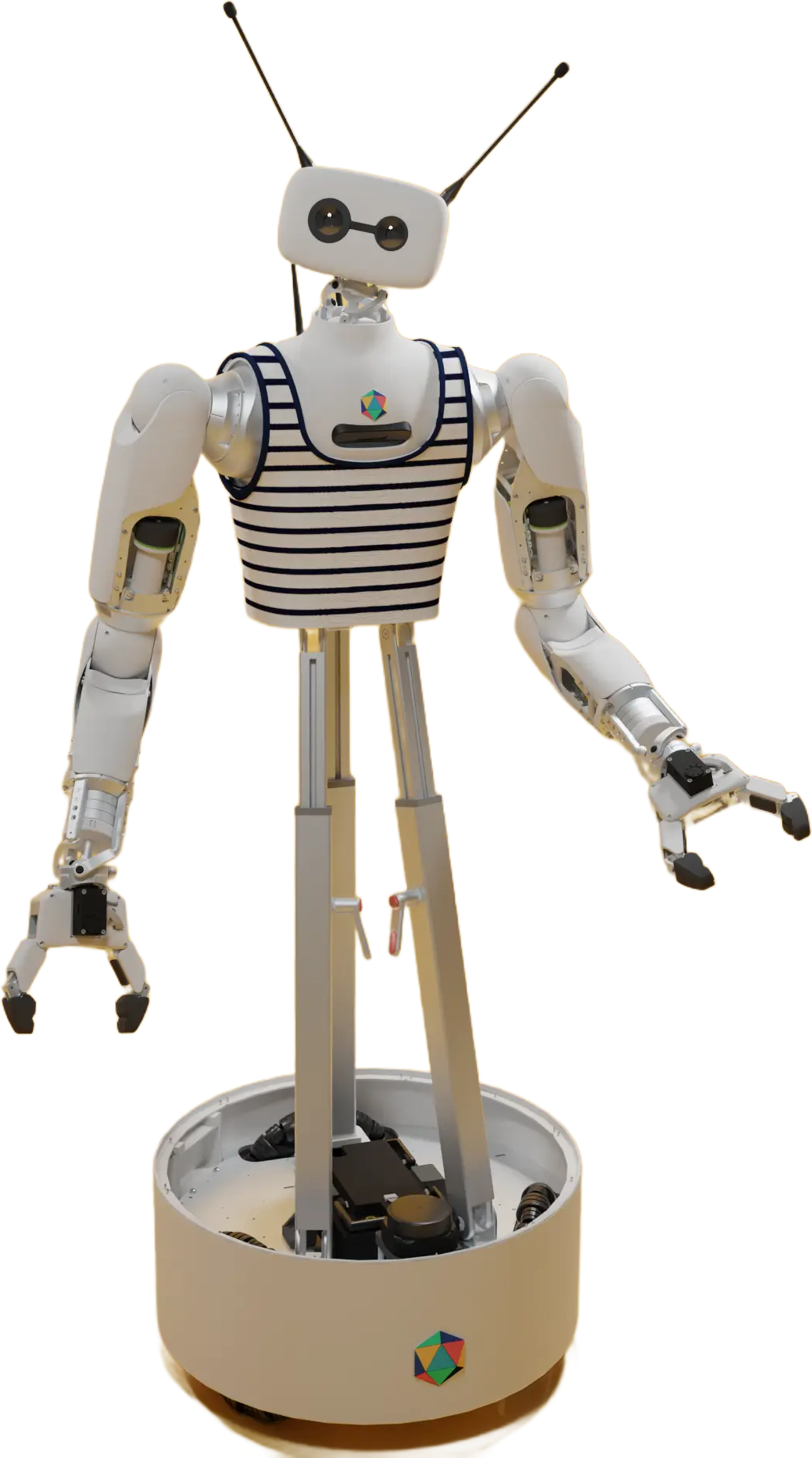
Reachy 2 is an open-source bimanual humanoid robot built by Pollen Robotics, a French company in Bordeaux, and now owned by Hugging Face, which acquired Pollen Robotics on April 14, 2025.[2] It is an upper-body humanoid with two 7-degree-of-freedom (DOF) arms, an expressive head, and an optional omnidirectional mobile base, designed for embodied AI research, VR-based teleoperation, and real-world manipulation. Both its hardware designs and software stack are open source: the code is freely available on GitHub under the Apache 2.0 license, and the robot is sold for about $70,000.[2][20]
| Reachy 2 | |
|---|---|
 | |
| General information | |
| Manufacturer | Pollen Robotics (acquired by Hugging Face in 2025) |
| Country of origin | France |
| Year introduced | 2024 |
| Status | Commercially available |
| Height | 136 to 166 cm (adjustable) |
| Weight | 50 kg |
| Degrees of freedom | 17 (arms) + 3 (neck) = 20 total (without grippers) |
| Arm DOF | 7 per arm |
| Payload | 3 kg per arm |
| Battery | LiFePO4 24V, 35Ah (mobile base); up to 10 hours runtime |
| Software license | Apache 2.0 (open source) |
| Price | Starting at approximately $70,000 USD |
| Website | pollen-robotics.com |
Reachy 2 is a bimanual mobile manipulator publicly debuted at CES 2025 and designed for embodied AI research, teleoperation, human-robot interaction, and real-world service applications. The robot features dual 7-DOF bio-inspired arms powered by patented Orbita actuators, an optional omnidirectional mobile base, stereo 3D vision, and VR-based teleoperation with 125 ms glass-to-glass latency.
Pollen Robotics describes Reachy 2 as "the first open-source humanoid robot specifically designed for embodied AI and real-world applications."[1] Both the hardware designs and software stack are released under open-source licenses, and the platform is fully integrated with ROS 2 and Hugging Face's LeRobot framework for machine learning-based robot control. In April 2025, Hugging Face acquired Pollen Robotics, positioning Reachy 2 as a cornerstone of the company's open-source robotics strategy.[2]
As of 2025, over 100 Reachy robots (across both generations) have been deployed in more than 20 countries at institutions including Cornell University, Carnegie Mellon University, EPFL, CNRS, CEA, and Accenture.[3]
What is Reachy 2 used for in one sentence?
Reachy 2 is an open-source, two-armed humanoid robot torso (usually on a wheeled mobile base) that researchers use as a hands-on platform for embodied AI, robot learning, VR teleoperation, and human-robot interaction, with all of its hardware and software published openly so it can be modified, repaired, and extended.[1][2]
Who makes Reachy 2?
Pollen Robotics
Pollen Robotics was founded in 2016 in Bordeaux, France, by Matthieu Lapeyre, Pierre Rouanet, Nicolas Rabault, and Jonathan Grizou, all former researchers from the Flowers team at Inria (the French National Institute for Research in Digital Science and Technology). The Flowers team, based at Inria's Bordeaux center and associated with ENSTA ParisTech, specializes in developmental robotics and machine learning.[4]
Before founding Pollen Robotics, the team had created the Poppy Project starting around 2013. Poppy was among the first fully 3D-printed open-source humanoid robots, designed for research in developmental robotics and education. The project attracted several thousand users within months of its release and demonstrated strong demand for accessible, open-source robotic platforms. The success of Poppy motivated Lapeyre and Rouanet to launch a commercial venture that could bring more capable open-source robots to the broader research and industry communities.[5]
Pollen Robotics operates under a set of stated principles that include commitment to open-source technology, local manufacturing in France, environmental responsibility, and a policy of non-engagement with military applications.[6]
Since April 2025, Pollen Robotics has operated as a subsidiary of Hugging Face. Hugging Face continues to sell Reachy 2 and to develop it as the hardware companion to its LeRobot software library.[2][3]
Funding and Milestones
| Year | Milestone |
|---|---|
| 2013 | Poppy Project launched at Inria Flowers team |
| 2016 | Pollen Robotics founded in Bordeaux, France |
| 2020 | Original Reachy robot launched at CES 2020 |
| 2021 | VR teleoperation capability introduced at CES 2021 |
| 2022 | Second place in ANA Avatar XPRIZE ($2 million prize) |
| 2023 | Secured 2.4 million euro seed funding round |
| 2024 | Reachy 2 launched (October) |
| 2025 (January) | Reachy 2 publicly debuted at CES 2025 |
| 2025 (April) | Acquired by Hugging Face |
In 2023, Pollen Robotics secured a seed funding round of 2.4 million euros from a private investor, Bpifrance (the French public investment bank), and two banking institutions.[7] Combined with the $2 million prize from the ANA Avatar XPRIZE competition in late 2022, the company had over 4 million euros to invest in expanding its R&D team and accelerating development of Reachy 2.
Reachy 1 (Original)
The original Reachy robot was launched at CES 2020 in Las Vegas. It featured bio-inspired arm joints and an expressive head, and was designed primarily for teleoperation and human-robot interaction research. Reachy 1 attracted attention for its fluid, natural movements and its interactive capabilities. At CES 2021, Pollen introduced VR teleoperation for Reachy, allowing users to control the robot remotely using standard VR headsets such as the Meta Quest 2. The operator could see through the robot's cameras and control its arm and head movements in real time.
Reachy 1 was adopted by approximately 100 institutions across 20 countries, primarily in academic and research settings. Its open-source design and accessible price point (relative to other research humanoids) made it popular among universities and research labs studying human-robot interaction, computer vision, and manipulation.
ANA Avatar XPRIZE
In November 2022, Pollen Robotics competed in the finals of the $10 million ANA Avatar XPRIZE competition in Long Beach, California. Out of 99 teams from around the world who registered in 2018, 17 finalist teams from 10 countries were selected for the final event. The competition challenged teams to create avatar systems that could transport a human's sense, actions, and presence to a remote location in real time.[8]
Pollen Robotics fielded an enhanced version of its Reachy robot, incorporating an early version of the three-finger hands, a mobile base with LiDAR, and improved teleoperation software. The competition tasks included moving a lever, traversing a 25-meter obstacle course, manipulating canisters, using a battery-powered drill, and selecting a rock based on its texture. Pollen's team took second place, winning $2 million. The first-place winner, Germany's Team NimbRo, completed its task sequence in approximately 5 minutes and 50 seconds, roughly half the time of Pollen's run.[9] The competition experience directly informed the design of Reachy 2, particularly in the areas of dexterous manipulation, mobile navigation, and low-latency teleoperation.
What are Reachy 2's specifications?
Overview
Reachy 2 is available in four configurations: dual-arm with mobile base, single-arm with mobile base, dual-arm with stationary base, and single-arm with stationary base. The dual-arm mobile base configuration is the most capable variant and the one most commonly referenced in technical documentation.
Physical Specifications
| Parameter | Value |
|---|---|
| Height | 136 to 166 cm (adjustable) |
| Weight | 50 kg (dual-arm with mobile base) |
| Shoulder width | 25 cm |
| Depth | 50 cm |
| Arm DOF | 7 per arm (14 total for dual-arm) |
| Neck DOF | 3 |
| Total DOF (dual-arm) | 17 (arms) + 3 (neck) + gripper DOF |
| Payload per arm | 3 kg |
| Mobile base type | Omnidirectional (3 omniwheels) |
| Recommended speed | 3.6 km/h |
| Maximum speed | 9 km/h (mobile base) |
| Average power consumption | 150 W |
| Peak power consumption | 300 W |
Orbita Actuators
The defining mechanical feature of Reachy 2 is its patented Orbita actuator system, developed in-house by Pollen Robotics. Orbita actuators are parallel mechanisms that enable fluid, human-like multi-axis movement. Reachy 2 uses two variants of the Orbita design.[10]
Orbita 3D is used in the neck and wrist joints. It provides three degrees of freedom (yaw, pitch, roll) through a concentric design with three stepped motorized axes.
| Orbita 3D Parameter | Value |
|---|---|
| Degrees of freedom | 3 (yaw, pitch, roll) |
| Motors | 3x Maxon ECX-T 22L brushless (40W each) |
| Gearbox | Maxon GPX22C (28:1 ratio) |
| Encoder | Maxon EASY MILE (1024 points) |
| Nominal speed | 50 rpm (70 rpm maximum) |
| Nominal torque | 3 N.m (15 N.m maximum for yaw) |
| Range of motion | Yaw: infinite rotation; Pitch/Roll: +/- 45 degrees |
| Backlash | 0.5 degrees nominal (1 degree maximum) |
| Weight | 950 g |
| Hollow axis diameter | 10 mm |
| Outer diameter | 75 mm |
| Power | 24V |
| Communication | EtherCAT |
| Control | Field-Oriented Control (FOC) |
Orbita 2D is used in the shoulder and elbow joints. It provides two degrees of freedom, both with infinite rotation capability.
| Orbita 2D Parameter | Value |
|---|---|
| Degrees of freedom | 2 (both with infinite rotation) |
| Motors | 2x Maxon EC45 Flat brushless (60W each) |
| Gearbox | Maxon GPX32UP (approximately 35:1 ratio) |
| Encoder | Maxon EASY MILE (1024 points) |
| Nominal speed | 50 rpm (70 rpm maximum) |
| Nominal torque | 12 N.m (16.5 N.m maximum) |
| Range of motion | Infinite rotation on both axes |
| Backlash | 0.5 degrees nominal (1 degree maximum) |
| Weight | 1,900 g |
| Hollow shaft diameter | 12.5 mm |
| Outer diameter | 95 mm |
| Power | 24V |
| Communication | EtherCAT |
| Control | Field-Oriented Control (FOC) |
Each 7-DOF arm consists of two Orbita 2D actuators (for the shoulder and elbow) and one Orbita 3D actuator (for the wrist). The neck uses a single Orbita 3D actuator. This design allows internal cable routing through hollow shafts, reducing the need for exposed wiring and improving durability.[10]
Grippers
Reachy 2 features parallel torque-controlled grippers that provide precise and adaptive object handling.
| Gripper Parameter | Value |
|---|---|
| Motor | Dynamixel XM430-W210-R |
| Nominal force | 10 N |
| Peak force | 50 N |
| Maximum opening | 100 mm |
| Finger movement | Parallel distal phalanx |
| Weight | 400 g |
| Control method | Current-based position control with adjustable force limitation |
| Power | 24V input (converted to 12V internally) |
| Tips | Removable/interchangeable; default hybrid hard tip with rubber-like covering |
The grippers are designed for safe interaction with a variety of materials and objects. Pollen Robotics has also released PincOpen, an open-source variant of the Reachy 2 gripper design that can be built independently.[11]
Sensor Suite
Reachy 2 incorporates multiple sensors for vision, depth perception, navigation, and audio.
| Sensor | Type | Location | Purpose |
|---|---|---|---|
| 2x IMX296 global shutter cameras | RGB | Head | Stereo vision for teleoperation and perception |
| Orbbec Gemini 336 | RGB-D (depth camera) | Torso | 3D depth perception for manipulation |
| Luxonis OAK-FFC ToF 33D | Time-of-Flight depth sensor | Head | Additional depth sensing |
| RPLIDAR S2 | 2D LiDAR | Mobile base | Navigation (30 m range, 32,000 measurements/second) |
| Hall sensors | Magnetic encoder | Each wheel | Wheel odometry |
| IMU | Inertial measurement unit | Each wheel | Motion tracking |
| 2x Lavalier Go microphones | Professional audio | Antennas | Stereo audio perception |
| Speaker | Audio output | Body | Voice output and audio feedback |
The Orbbec Gemini 336 uses Orbbec's MX6800 depth engine chip, combining active structured light and passive binocular imaging to produce reliable 3D depth data in conditions ranging from complete darkness to direct sunlight.[12] The IMX296 global shutter cameras are positioned in the robot's head to provide a stereoscopic view, which is streamed directly to the VR headset during teleoperation.
Mobile Base
The optional mobile base gives Reachy 2 omnidirectional ground mobility using a holonomic three-omniwheel configuration.
| Mobile Base Parameter | Value |
|---|---|
| Drive type | 3 omniwheels (holonomic) |
| Shape | Cylindrical |
| LiDAR | RPLIDAR S2 |
| Battery | OlenBox LiFePO4 24V, 35Ah |
| Battery chemistry | Lithium Iron Phosphate (LiFePO4) |
| Runtime | Up to 10 hours |
| Battery warranty | 5 to 10 years |
| Charging time | Approximately 3 hours |
| Sensors per wheel | Hall encoder + IMU |
| Navigation | ROS 2 navigation stack |
The holonomic drive system allows the robot to move in any direction without needing to rotate first, which is particularly useful in confined indoor environments such as laboratories, offices, and healthcare facilities. The LiFePO4 battery chemistry was chosen for its long cycle life and thermal stability.
Onboard Computing
Reachy 2 uses a SolidRun Bedrock V3000 as its onboard computer. This is a fanless industrial PC optimized for reliability in a robotics environment rather than for AI inference workloads.[13]
| Computing Parameter | Value |
|---|---|
| Computer | SolidRun Bedrock V3000 |
| Type | Fanless industrial PC |
| Design philosophy | CPU-powered; AI workloads offloaded to external GPU/TPU machines |
| Connectivity | Wi-Fi, Ethernet, USB |
| Software updates | Over-the-air (OTA) |
The computing architecture intentionally separates robot control (handled onboard) from AI inference (handled by external computers provided by the user). This design gives researchers the flexibility to pair Reachy 2 with whatever GPU or computing infrastructure they prefer, from a laptop with a consumer GPU to a high-end server with multiple NVIDIA GPUs.
Is Reachy 2 open source?
Yes. Reachy 2's entire software stack and hardware designs are released as open source: the source code is publicly available on GitHub under the permissive Apache 2.0 license, and Pollen Robotics also publishes 3D CAD models, firmware, APIs, and simulation environments.[2][20] The Apache 2.0 license allows researchers and companies to use, modify, and redistribute the code, including in commercial products.
Software Stack
Reachy 2's entire software stack was released as open source after more than two years of internal development at Pollen Robotics. The stack includes several layers.[14]
Python SDK: A high-level programming interface that allows developers to control the robot's arms, grippers, head, and mobile base with straightforward Python code. The SDK provides access to forward and inverse kinematics, sensor data, and motion planning.
ROS 2 Middleware: The robot runs natively on ROS 2 Humble, exposing standard ROS 2 interfaces including ROS 2 control, transforms (TFs), and robot state publishers. This enables integration with the broader ROS 2 ecosystem of tools and packages.
VR Teleoperation Application: A Unity-based VR application allows operators to control Reachy 2 remotely using standard VR headsets such as the Meta Quest 2 or Meta Quest 3. The operator sees a stereoscopic view from the robot's head cameras and controls arm and head movements through natural gestures.
Dashboard: A web-based monitoring interface provides OTA software upgrades, service control, and real-time robot status monitoring.
Simulation: Reachy 2 is supported in both Gazebo and MuJoCo simulators, enabling researchers to develop and test control policies in simulation before deploying them on physical hardware.
Visualization: The software stack supports visualization through RViz, Foxglove, and rerun.io.
The entire stack is distributed via Docker containers, allowing one-line installation and setup on compatible Linux machines.[14]
LeRobot Integration
Reachy 2 is one of the natively supported hardware platforms for LeRobot, Hugging Face's open-source library for robot learning. LeRobot implements state-of-the-art policies in PyTorch, covering imitation learning, reinforcement learning, and vision-language-action (VLA) models.[15]
The LeRobot integration enables researchers to:
- Collect demonstration data through teleoperation and store it in the standardized LeRobotDataset format
- Train imitation learning and reinforcement learning policies using Reachy 2 demonstration data
- Deploy trained neural network policies directly onto the robot
- Share datasets and trained models through the Hugging Face Hub
The LeRobotDataset format uses synchronized MP4 videos for camera streams and Parquet files for state and action data. As of 2025, the Hugging Face Hub hosts over 100 LeRobot repositories with robotics datasets and models.[2]
Hugging Face's collaboration with Pollen Robotics on LeRobot integration began in 2024, before the acquisition, when Remi Cadene (formerly of Tesla's Optimus team) joined Hugging Face to lead its robotics efforts. The LeRobot library has grown to over 12,000 GitHub stars since its May 2024 announcement.[2]
Open-Source Hardware
In addition to the software, Pollen Robotics publishes complete 3D hardware models and comprehensive documentation on the Hugging Face Hub under the pollen-robotics organization. This includes CAD files, assembly instructions, and bill-of-materials information for the Orbita actuators and other mechanical components. The open hardware approach allows researchers to modify, repair, and extend the robot's physical design.[16]
How does Reachy 2's VR teleoperation work?
Teleoperation is a core capability of Reachy 2 and one of the features that most distinguishes it from competing research platforms. The system achieves a glass-to-glass latency of 125 milliseconds, meaning the time from a camera frame being captured on the robot to it being displayed in the VR headset is 125 ms.[1]
The teleoperation system works as follows:
- The operator wears a VR headset (such as Meta Quest 2 or Meta Quest 3) and holds VR controllers.
- The stereoscopic camera feed from Reachy 2's head is streamed to the VR display, giving the operator a first-person view through the robot's eyes.
- Head tracking from the VR headset controls the robot's neck (via the Orbita 3D actuator), so the robot looks where the operator looks.
- Hand and arm movements from the VR controllers are mapped to the robot's 7-DOF arms, with the robot replicating the operator's gestures in real time.
- Grip inputs on the VR controllers actuate the robot's grippers.
- Stereo audio from the robot's microphones is relayed to the operator's headset.
This system requires no specialized training or robotics expertise from the operator, making it accessible for data collection, remote task execution, and demonstration purposes. The teleoperation capability proved critical during the ANA Avatar XPRIZE competition and remains one of the primary ways researchers collect training data for machine learning models.[8]
How does Hugging Face fit in?
On April 14, 2025, Hugging Face announced the acquisition of Pollen Robotics for an undisclosed amount. This was the fifth acquisition in Hugging Face's history, following earlier purchases of Gradio and XetHub. Pollen Robotics' co-founders, Matthieu Lapeyre and Pierre Rouanet, along with approximately 20 Pollen employees, joined Hugging Face.[2]
Thomas Wolf, co-founder and Chief Scientist at Hugging Face, stated: "We believe robotics could be the next frontier unlocked by AI. It should be open, affordable, and private. Our vision: a future where everyone in the community, from hobbyists to enterprises, can build or use robot assistants or games, starting from open solutions instead of closed, remote controlled, hardware."[2]
Matthieu Lapeyre commented: "From the start, we built Pollen Robotics with open source at its core, driven by our belief that robots will play a profound role in our lives, serving as the interface between AI and the physical world. Hugging Face is a natural home for us to grow, as we share a common goal: putting AI and robotics in the hands of everyone."[2]
The acquisition positioned Hugging Face as a provider of both robotics software (through LeRobot) and hardware (through Reachy 2), creating an end-to-end open-source robotics ecosystem. Hugging Face also continued selling Reachy 2 directly through the Pollen Robotics sales channel.[3]
Reachy Mini
Following the acquisition, Hugging Face announced Reachy Mini in mid-2025, a small desktop robot derived from Reachy 2's design philosophy. Priced from $299 for the Lite version and $449 for the Wireless version (with built-in Raspberry Pi 5), Reachy Mini is aimed at hobbyists, educators, and developers who want an accessible entry point into robotics AI. It features six degrees of freedom, a wide-angle camera, microphones, a speaker, and integration with the Hugging Face ecosystem of over 1.7 million AI models.[17] Reachy Mini is a distinct, much smaller product and should not be confused with Reachy 2, the full-size two-armed research humanoid.
What is Reachy 2 used for?
Academic Research
Reachy 2's primary market is academic and research institutions. The robot is used at Cornell University, Carnegie Mellon University, EPFL, CNRS, and other leading institutions for research in:
- Human-robot interaction studies
- Imitation learning and learning from demonstration
- Computer vision and 3D perception for manipulation
- Dexterous manipulation and grasping
- Natural language processing for robot command interfaces
- Social robotics and assistive technology
Service and Industry
The robot's VR teleoperation and mobile base make it suitable for service applications in environments such as healthcare facilities, hospitality, retail, and industrial inspection. Accenture is among the corporate users exploring Reachy 2 for service and interaction scenarios.[3]
Embodied AI Development
With the Hugging Face acquisition and LeRobot integration, Reachy 2 serves as a development platform for embodied AI research. Researchers can use the robot to collect real-world demonstration data, train neural network policies in simulation or from demonstrations, and deploy those policies on the physical robot. The platform's compatibility with NVIDIA's GR00T N1 foundation model (released on the Hugging Face Hub in March 2025) further expands its utility for researchers working on foundation models for robotics.[2]
How much does Reachy 2 cost?
Reachy 2 is commercially available starting at approximately $70,000 USD, with the full dual-arm mobile base configuration listed at around $78,000 USD by some resellers.[18] Hugging Face has confirmed the $70,000 starting price and continues to sell the robot, which runs on code freely available under the Apache 2.0 license.[2][20] The robot is sold directly through Pollen Robotics (now a Hugging Face subsidiary) and through authorized distributors.
| Configuration | Description |
|---|---|
| Dual-arm with mobile base | Two 7-DOF arms, omnidirectional mobile base with LiDAR |
| Single-arm with mobile base | One 7-DOF arm, omnidirectional mobile base with LiDAR |
| Dual-arm with stationary base | Two 7-DOF arms, fixed mounting |
| Single-arm with stationary base | One 7-DOF arm, fixed mounting |
All configurations include the head with stereo cameras and depth sensors, the Orbita actuator system, the Python SDK, ROS 2 support, and access to the VR teleoperation application. The mobile base configurations additionally include the LiFePO4 battery, omniwheels, and LiDAR navigation system.
The robot is CE certified and compliant with ISO/TS 15066 collaborative safety standards.[19]
How does Reachy 2 compare to other humanoid robots?
Reachy 2 occupies a distinctive position in the humanoid robotics market as an open-source platform priced for research budgets. Most competing humanoid robots are either significantly more expensive, closed-source, or designed for industrial rather than research applications.
| Robot | Manufacturer | Type | Open Source | Approximate Price | Primary Market |
|---|---|---|---|---|---|
| Reachy 2 | Pollen Robotics / Hugging Face | Upper-body humanoid with mobile base | Yes (hardware and software) | $70,000 to $78,000 | Research, education, embodied AI |
| NAO | SoftBank Robotics | Small humanoid | Partial | $9,000 to $16,000 | Education, research |
| Digit | Agility Robotics | Full-body bipedal | No | Not publicly listed | Logistics, warehouse |
| Figure 02 | Figure AI | Full-body bipedal | No | ~$100,000 (estimated) | Manufacturing, logistics |
| Unitree G1 | Unitree Robotics | Full-body bipedal | Partial | ~$16,000 | Research, development |
| Atlas | Boston Dynamics | Full-body bipedal | No | Not publicly sold | Research (internal) |
Reachy 2's main differentiators are its fully open-source nature (both hardware and software), its VR teleoperation system, its integration with the Hugging Face and LeRobot ecosystems, and its focus on upper-body manipulation rather than bipedal locomotion. By using a wheeled mobile base rather than legs, Reachy 2 avoids the complexity and cost of bipedal balancing while still achieving reliable indoor mobility.
See Also
- Pollen Robotics
- Hugging Face
- Humanoid robots
- Embodied AI
- Robot learning
- ROS (Robot Operating System)
- Teleoperation
- LeRobot
- Imitation learning
References
- "Reachy 2 - the first open-source humanoid robot designed for embodied AI." Pollen Robotics official website. https://www.pollen-robotics.com/reachy/ ↩
- "Hugging Face to sell open-source robots thanks to Pollen Robotics acquisition." Hugging Face Blog, April 14, 2025. https://huggingface.co/blog/hugging-face-pollen-robotics-acquisition ↩
- "AI company Hugging Face buys humanoid robot company Pollen Robotics, maker of Reachy 2." Fortune, April 14, 2025. https://fortune.com/2025/04/14/ai-company-hugging-face-buys-humanoid-robot-company-pollen-robotics-reachy-2/ ↩
- "Flowers - AI & Cognitive Science Lab." Inria. https://flowers.inria.fr/team/ ↩
- "Poppy: Open source 3D printed robot for experiments in developmental robotics." ResearchGate. https://www.researchgate.net/publication/294121745_Poppy_Open_source_3D_printed_robot_for_experiments_in_developmental_robotics ↩
- "About Pollen Robotics." Pollen Robotics official website. https://www.pollen-robotics.com/about-us/ ↩
- "Pollen Robotics leve 2,4 millions d'euros pour le developpement de son robot Reachy." L'Usine Digitale, 2023. https://www.usine-digitale.fr/article/pollen-robotics-leve-2-4-millions-d-euros-pour-le-developpement-de-son-robot-reachy.N2148612 ↩
- "Analysis and Perspectives on the ANA Avatar XPRIZE Competition." arXiv, 2024. https://arxiv.org/html/2401.05290v1 ↩
- "NimbRo Announced as Winner of the $10M ANA Avatar XPRIZE." XPRIZE Foundation. https://go.xprize.org/prizes/avatar/articles/ana-avatar-xprize-winners ↩
- "Motors & Actuators specifications." Reachy 2 Documentation. https://docs.pollen-robotics.com/hardware-guide/specifications/motors-actuators/ ↩
- "PincOpen - A low cost and open source parallel-finger gripper, derived from Reachy 2's gripper." Pollen Robotics GitHub. https://pollen-robotics.github.io/PincOpen/ ↩
- "Bringing Vision to Embodied AI: How Orbbec's Gemini 336 Powers Reachy 2's Real-World Perception." Orbbec News. https://www.orbbec.com/news/bringing-vision-to-embodied-ai-how-orbbecs-gemini-336-powers-reachy-2s-real-world-perception-across-top-global-research-labs/ ↩
- "Reachy 2 Specifications: Key Features, Architecture & Dimensions." Reachy 2 Documentation. https://docs.pollen-robotics.com/hardware-guide/specifications/general/ ↩
- "Reachy 2 humanoid - full ROS 2 dev stack now open-source." Open Robotics Discourse. https://discourse.openrobotics.org/t/reachy-2-humanoid-full-ros-2-dev-stack-now-open-source-one-line-docker-sim-python-sdk/43362 ↩
- "LeRobot: Making AI for Robotics more accessible with end-to-end learning." Hugging Face GitHub. https://github.com/huggingface/lerobot ↩
- "pollen-robotics." Hugging Face Hub. https://huggingface.co/pollen-robotics ↩
- "Reachy Mini - The Open-Source Robot for Today's and Tomorrow's AI Builders." Hugging Face Blog. https://huggingface.co/blog/reachy-mini ↩
- "Reachy 2 Open-Source Humanoid Robot Now Available for $70,000." AIBase News. https://news.aibase.com/news/17257 ↩
- "Reachy 2 by Pollen Robotics: Price, Details, Review 2026." OriginOfBots. https://www.originofbots.com/robot/reachy-2-by-pollen-robotics-details-specifications-rating ↩
- "Hugging Face buys a humanoid robotics startup." TechCrunch, April 14, 2025. https://techcrunch.com/2025/04/14/hugging-face-buys-a-humanoid-robotics-startup/ ↩
Improve this article
Add missing citations, update stale details, or suggest a clearer explanation. Every suggestion is reviewed for sourcing before it goes live.
5 revisions by 1 contributors · full history