Sunday Robotics MEMO
Last edited
Fact-checked
In review queue
Sources
15 citations
Revision
v7 · 3,251 words
Fact-checks are independent of edits: a reviewer re-verifies the article against its sources and stamps the date. How we verify
| MEMO | |
|---|---|
 | |
| General information | |
| Manufacturer | Sunday Robotics |
| Country of origin | United States |
| Release year | 2026 |
| Status | Pre-commercial (Beta) |
| Price | ~$20,000 (handbuilt prototype); target under $10,000 at scale |
| Availability | Founding Family Beta (50 households, late 2026) |
| Website | sunday.ai |
MEMO is a wheeled humanoid robot developed by Sunday Robotics (commonly known as Sunday), an American artificial intelligence and robotics startup based in Mountain View, California.[2] Unlike full-body bipedal humanoids, MEMO uses a torso-on-wheels design that prioritizes stability, safety, and energy efficiency for household environments. The robot is purpose-built to perform domestic chores such as clearing tables, loading dishwashers, folding laundry, and brewing espresso.[9]
MEMO is powered by ACT-1, Sunday's proprietary foundation model trained entirely on human demonstration data collected through the company's patented Skill Capture Glove.[8] The robot was trained on approximately 10 million episodes of real household routines gathered from over 500 homes, making it one of the most data-rich domestic robot platforms ever developed.[10] Sunday emerged from stealth in November 2025 and reached a $1.15 billion valuation in March 2026 following a $165 million Series B funding round led by Coatue Management.[6][7]
Sunday Robotics
Founding and history
Sunday Robotics was co-founded by Tony Zhao (CEO) and Cheng Chi (CTO), both Stanford-trained roboticists whose academic research helped shape the field of modern robot learning.[2] Before starting Sunday, the two founders made significant contributions to imitation learning and robot manipulation.
Tony Zhao earned a B.S. in Electrical Engineering and Computer Science from UC Berkeley in 2021 and subsequently entered Stanford's PhD program, where he was advised by Sergey Levine and Chelsea Finn. At Stanford, Zhao led the development of ALOHA (A Low-cost Open-source Hardware System for Bimanual Teleoperation), a bimanual robot platform that demonstrated how robots could learn fine-grained manipulation tasks from as little as 10 minutes of demonstration data.[11] The accompanying algorithm, Action Chunking with Transformers (ACT), reduced the effective decision horizon by predicting actions in chunks, achieving 80 to 90 percent success rates on precision tasks.[11] Zhao also contributed to Mobile ALOHA, which extended the system with a mobile base for whole-body teleoperation. He left Stanford's PhD program in 2024 to co-found Sunday. Zhao previously held positions at Google DeepMind and Tesla Autopilot.
Cheng Chi earned a B.S. in Computer Science from the University of Michigan and completed his Ph.D. at Columbia University under Professor Shuran Song. Chi invented Diffusion Policy, a method for generating robot behavior by representing a robot's visuomotor policy as a conditional denoising diffusion process. Benchmarked across 15 tasks from four robot manipulation benchmarks, Diffusion Policy outperformed existing state-of-the-art methods by an average of 46.9 percent.[12] Chi also contributed to the development of the UMI (Universal Manipulation Interface) gripper. His work earned two Best Paper Awards and two Best Systems Paper Finalist recognitions.
The founders began developing MEMO's first prototype in a garage in late 2024, working with 3D printers to iterate on hardware designs. Sunday emerged from stealth on November 19, 2025, alongside the announcement of $35 million in Series A funding led by Benchmark and Conviction.[2][3]
Team and growth
At launch, Sunday had approximately 25 engineers and researchers. By March 2026, the team had grown to over 70, with the engineering team tripling and the research team quadrupling since the stealth exit.[6] Team members bring experience from Stanford, Tesla, DeepMind, Waymo, Meta, OpenAI, Apple, and Neuralink. Notable hires include former Tesla FSD (Full Self-Driving) engineers Nishant Desai and Nadeesha Amarasinghe, as well as Perry Jia from Tesla's Optimus ML systems team.
Funding
| Round | Date | Amount | Lead Investor(s) | Valuation | Key Participants |
|---|---|---|---|---|---|
| Series A | November 2025 | $35 million | Benchmark, Conviction | Not disclosed | Eric Vishria (Benchmark)[2][3] |
| Series B | March 2026 | $165 million (oversubscribed) | Coatue | $1.15 billion | Bain Capital Ventures, Fidelity Management & Research, Tiger Global, Benchmark, Conviction, Xtal Ventures[6][7] |
The Series B round made Sunday a unicorn, with Thomas Laffont of Coatue joining the board. By this point, the company reported over 1,000 people on its waitlist for MEMO.[6]
Design and hardware
Form factor
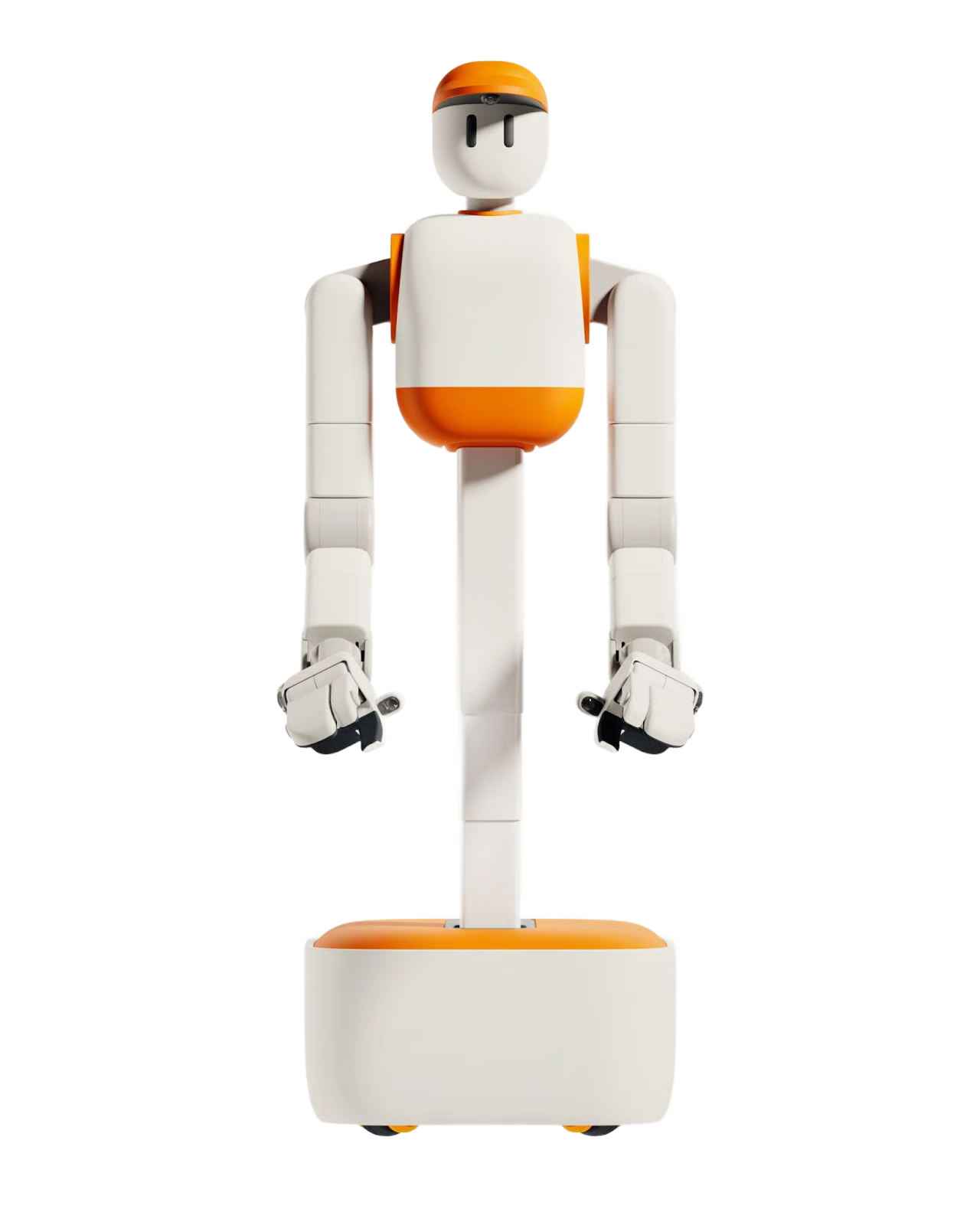
MEMO deliberately departs from the bipedal humanoid form factor used by competitors such as Tesla Optimus, Figure 02, and Agility Robotics Digit. Instead, it uses a half-body torso mounted on a wide, low-profile wheeled base that resembles an oversized robotic vacuum.[9] This design choice offers several advantages for home environments: passive stability (MEMO will not tip over if power is cut), a low center of gravity, reduced weight, and no need to expend energy constantly maintaining balance.
The robot stands 1.7 meters (5 feet 7 inches) tall and weighs 77 kilograms (170 pounds). Its dimensions are approximately 170 x 60 x 60 centimeters. MEMO features a telescoping central column (sometimes called the "Z-axis spine") that raises and lowers the upper body, allowing the arms to reach from floor level up to approximately 2.1 meters (6 feet 10 inches). The horizontal arm reach is 0.8 meters.[14] This range of motion allows MEMO to pick items off the floor, work at countertop height, and access overhead shelves and cabinets.
Aesthetic and materials
MEMO adopts a deliberately non-threatening, cartoonish aesthetic. It has a rounded head with simple straight eyes and a hat-like top piece (described as resembling a "colorful baseball cap" with a 360-degree camera). The body is covered in a soft silicone shell over a blend of rigid and elastic polymers, designed for both safety and easy cleaning with standard household products. The silicone exterior provides a soft-touch finish that reduces the risk of injury during accidental contact with people or pets. MEMO is available in different colors and decorative hat accessories for personalization.[9]
End effectors
Rather than using five-fingered anthropomorphic hands, MEMO employs custom dual grippers with a pincer-like design. Each gripper has four fingers and is optimized to balance the geometry of a human hand with enhanced grip strength and precision. The grippers include integrated touch and pressure sensors for force-sensitive manipulation, enabling the robot to handle delicate objects such as wine glasses without breaking them.[9]
Technical specifications
| Category | Specification | Value |
|---|---|---|
| Physical | Height | 170 cm (5'7") |
| Physical | Weight | 77 kg (170 lbs) |
| Physical | Dimensions | 170 x 60 x 60 cm |
| Physical | Material | Rigid and elastic polymers with soft silicone shell |
| Mobility | Locomotion type | Wheeled base |
| Mobility | Max speed | 1 m/s (3.6 km/h, 2.2 mph) |
| Mobility | Operating environment | Indoor only |
| Manipulation | Total degrees of freedom | 20+ |
| Manipulation | DOF per arm | 7 |
| Manipulation | Fingers per gripper | 4 (dual gripper) |
| Manipulation | Vertical reach | 2.1 m (6'10") |
| Manipulation | Horizontal reach | 0.8 m |
| Manipulation | Carrying capacity | 3 kg |
| Manipulation | Deadlift capacity | 10 kg |
| Power | Battery type | Lithium-ion polymer |
| Power | Battery capacity | ~50,000 mAh |
| Power | Runtime | 4 hours continuous |
| Power | Charge time | ~1 hour (0 to 80%) |
| Power | Power consumption | 150W average, 300W peak |
| Power | Battery lifespan | 3 to 5 years |
| Sensors | Vision | RGB cameras, stereo cameras, 3D depth sensors |
| Sensors | Inertial | IMU, gyroscope |
| Sensors | Proximity | Ultrasonic sensors, proximity sensors |
| Sensors | Tactile | Force sensors, touch/pressure sensors in grippers |
| Navigation | System | Indoor SLAM, visual SLAM, 3D mapping |
| Computing | Operating system | Proprietary OS (Linux-based) with ACT-1 control stack |
| Computing | Software architecture | ROS2-based components, Python/C++ |
| Computing | Learning capability | Imitation learning, long-horizon task planning |
| Connectivity | Wireless | Wi-Fi, Bluetooth |
| Connectivity | Wired | Ethernet |
| Interface | Control methods | Voice commands, mobile app, gesture recognition, touch panel |
| Safety | Protection rating | IP54 |
| Safety | Operating temperature | 10 to 40 degrees C |
| Safety | Safety features | Compliant control, collision detection, low-speed operation, soft shell, emergency stop, passive stability |
ACT-1 foundation model
MEMO's intelligence is driven by ACT-1, Sunday's proprietary foundation model for robotic manipulation and navigation. ACT-1 is notable for being trained on "zero robot data" in the traditional sense: rather than collecting training trajectories through teleoperation of the robot itself, all training data comes from human demonstrations captured through the Skill Capture Glove.[8]
Architecture and capabilities
ACT-1 is the first foundation model to combine long-horizon manipulation with map-conditioned navigation in a single end-to-end model.[8] This means the robot can seamlessly transition between navigating a home and performing fine manipulation tasks without switching between separate planning and execution modules.
The model's capabilities were demonstrated through the "Table-to-Dishwasher" task, which Sunday describes as "the most complex task ever done by a robot autonomously."[8] This single continuous task involves:
- 33 unique dexterous interactions (68 total) with 21 different objects
- Navigation exceeding 130 feet (approximately 40 meters)
- Operations spanning from millimeter-level precision to room-scale movement
- Handling of transparent and reflective objects such as wine glasses
ACT-1 learns to interpret 3D environmental maps rather than memorize specific locations, enabling zero-shot generalization to unseen environments. Sunday demonstrated this capability by successfully deploying MEMO to six previously unseen Airbnb rental properties without any retraining or environment-specific configuration.[8]
Relationship to prior research
ACT-1 builds on the founders' academic contributions. Tony Zhao's Action Chunking with Transformers (ACT) algorithm, developed for ALOHA, introduced the concept of predicting robot actions in temporal chunks to reduce compounding errors. Cheng Chi's Diffusion Policy contributed techniques for expressing complex multimodal action distributions. Together, these research threads inform ACT-1's ability to handle long-horizon, multi-step tasks in unstructured environments.
Skill Capture Glove
One of Sunday's core innovations is the Skill Capture Glove, a patented wearable device that records high-fidelity motion and force data from natural human movements during household tasks. The glove shares the exact same geometry and sensor layout as MEMO's gripper, enabling direct transfer of captured data to the robot.[5]
Design and cost
Each Skill Capture Glove costs approximately $200 to produce, representing a roughly 100-fold cost reduction compared to traditional teleoperation rigs, which typically cost around $20,000.[5] This dramatic cost reduction enables data collection at scale. By early 2026, Sunday had distributed over 2,000 gloves to participants (called "Memory Developers") across more than 500 real homes.[10]
Data collection pipeline
Memory Developers wear the gloves while performing ordinary household chores in their own homes. The gloves record the full range of hand movements, grip forces, and spatial trajectories during tasks such as loading a dishwasher, folding laundry, or organizing a kitchen counter. This approach captures the "messy reality" of actual home environments, including varied floor plans, different appliance brands, cluttered surfaces, and unpredictable household conditions.
The collected data is processed through Sunday's proprietary Skill Transform software pipeline, which converts raw human motion data into robot-compatible movements. This pipeline accounts for differences in human and robot arm lengths, proportions, and body geometry, achieving a claimed 90 percent or higher success rate in data conversion.
Training data scale
The Skill Capture Glove program has generated approximately 10 million episodes of genuine household routines.[10] This dataset is significantly larger and more diverse than what is typically available for household robot training, which traditionally relies on laboratory environments or simulation. Sunday has stated plans to increase its in-the-wild data collection by fivefold by the end of 2026.
Demonstrated capabilities
MEMO's capabilities have evolved rapidly since the first prototype was built in late 2024. In December 2024, the robot had only one arm and could perform a single task (arranging shoes). By October 2025, it had been trained on multiple skills, and the company adds new capabilities on a monthly basis.
Kitchen and dining
- Clearing tables of plates, cups, utensils, and delicate glassware
- Throwing out food scraps
- Loading and running a dishwasher
- Pulling espresso shots from an espresso machine (with proper crema)
- Basic food preparation assistance
Laundry and organization
- Folding socks and clothing items
- Handling laundry piles
- Organizing shoes
- General tidying and putting away items
Navigation and autonomy
MEMO operates at approximately 50 percent of human speed, prioritizing safety over speed in home environments. During demonstrations, the robot has completed complex multi-step routines involving navigation of over 100 feet, manipulation of more than 20 objects, and chaining nearly 70 sequential actions autonomously. Sunday reports zero breakages across 20 or more live demonstrations involving delicate glassware.[8]
Safety features
Safety is a central design principle for MEMO, given that it operates in homes alongside families, children, and pets.
Compliant control
MEMO uses compliant control, meaning that users can safely push or redirect the robot's limbs while it is in the middle of a manipulation task. The robot will not resist or become stiff when touched, reducing the risk of injury during unexpected physical contact.
Passive stability
Unlike bipedal humanoid robots that require continuous power to maintain balance, MEMO's wheeled base provides passive stability. If power is cut at any point, the robot will not drop its weight, tip over, or fall. This eliminates a significant safety concern associated with legged humanoid robots in domestic settings.
Low-speed operation
MEMO deliberately operates at a slower pace than its maximum capability. The robot moves at what has been described as a "glacial pace," prioritizing predictability and safety around household members over task completion speed.
Emergency stop and collision detection
The robot includes an emergency stop mechanism and built-in collision detection through its suite of ultrasonic and proximity sensors. The soft silicone exterior shell provides an additional layer of impact absorption during accidental contact.
Availability and pricing
Founding Family Beta
Sunday opened applications for its "Founding Family Beta" program on November 19, 2025. The program will select 50 households to receive individually numbered MEMO units in late 2026, with deployment targeted by Thanksgiving 2026.[7] Selected participants receive direct support from the Sunday engineering team and the opportunity to influence future capabilities. The beta program is offered free of charge to participants.
Pricing trajectory
As of early 2026, building a single MEMO by hand costs approximately $20,000. Sunday has publicly committed to a target retail price under $10,000 once manufacturing reaches scale, positioning MEMO as a high-end domestic appliance rather than an industrial or commercial robot.[6] The company plans broader consumer availability following the beta period, with scaled production and wider rollout projected for 2027 to 2028.
User interface and updates
MEMO connects to a companion mobile app and supports integration with smart home platforms. The robot receives over-the-air (OTA) software updates, allowing Sunday to push new skills and improvements to deployed units. Cloud-based training and remote diagnostics are also supported.
Competitive landscape
MEMO occupies a distinctive position in the growing household robotics market. While most high-profile humanoid robot projects target industrial and commercial applications, Sunday focuses exclusively on the consumer home market.
Comparison with competitors
| Robot | Company | Form factor | Primary market | Locomotion | Estimated price |
|---|---|---|---|---|---|
| MEMO | Sunday Robotics | Wheeled torso | Consumer/home | Wheeled | ~$20,000 (target under $10,000) |
| Optimus Gen 3 | Tesla | Full bipedal humanoid | Industrial/home | Bipedal | ~$20,000 to $30,000 (estimated) |
| Figure 02 | Figure AI | Full bipedal humanoid | Industrial/commercial | Bipedal | Not disclosed |
| NEO | 1X Technologies | Full bipedal humanoid | Consumer/home | Bipedal | $20,000 (or $499/month) |
| Digit | Agility Robotics | Full bipedal humanoid | Warehouse/logistics | Bipedal | Not disclosed |
| Eggie | Tangible Robots | Full bipedal humanoid | Consumer/home | Bipedal | Not disclosed |
Sunday differentiates itself from these competitors in several key ways. First, the wheeled base design trades stair-climbing ability for superior stability and lower power consumption in single-floor home environments. Second, the Skill Capture Glove approach generates training data at a fraction of the cost of traditional teleoperation. Third, the data-centric approach (learning from millions of real-world household episodes rather than simulation or lab data) represents a fundamentally different training philosophy.
Eric Vishria of Benchmark, one of Sunday's early investors, noted that "most home robots start as adaptations of industrial machines, and those trained in labs rarely succeed in unpredictable, real-world environments."[2] Sunday's approach of collecting data directly from real homes is designed to address this gap.
Simulation vs. real-world data
The broader robotics industry is divided between simulation-based and real-world data approaches to robot training. Some teams, such as CMU's VIRAL system, train entirely in simulated environments using reinforcement learning and photorealistic rendering. Sunday has bet on the opposite approach, arguing that the "messy reality of 500 real homes beats the pristine physics of any simulator."[10] The company's massive real-world dataset is central to its competitive strategy.
Development timeline
| Date | Milestone |
|---|---|
| Late 2024 | First MEMO prototype built in a garage; single arm, one task (shoe arrangement) |
| November 19, 2025 | Sunday emerges from stealth; $35M Series A announced; Founding Family Beta applications open[2][3] |
| October 2025 | MEMO trained on multiple skills including dishwashing, laundry folding, espresso preparation |
| March 12, 2026 | $165M Series B at $1.15B valuation; team exceeds 70 members; 1,000+ waitlist applicants[6][7] |
| Late 2026 (target) | Founding Family Beta deployment to 50 households by Thanksgiving 2026[7] |
| 2027 to 2028 (projected) | Scaled production and broader consumer availability |
See also
- Humanoid robots
- Humanoid robot
- Sunday Robotics
- Imitation learning
- Diffusion Policy
- Embodied AI
- Robot learning
- Tesla Optimus
- Figure AI
References
- Sunday Robotics official website
- "Sunday wants to put a robot in every home, beginning with the launch of Memo." SiliconANGLE, November 20, 2025. ↩
- "Sunday Emerges from Stealth with $35M for Household Robot Called Memo." The AI Insider, November 20, 2025. ↩
- "Sunday unveils new humanoid robot for the home." Robotics and Automation News, November 21, 2025.
- "Sunday Unveils Memo: A Wheeled, Domestic Robot That Learns From $200 Gloves." Humanoids Daily, 2025. ↩
- "Humanoid robotics maker Sunday reaches $1.15B valuation to build household robots." TechCrunch, March 12, 2026. ↩
- "Sunday Raises $165M to Launch First Autonomous Robots by Thanksgiving." GlobeNewsWire, March 12, 2026. ↩
- "ACT-1: A Robot Foundation Model Trained on Zero Robot Data." Sunday Robotics Journal. ↩
- "Half-bodied personal home robot memo cleans houses and picks up dishes with clamp-style hands." Designboom, November 20, 2025. ↩
- "This Home Robot Learned to Do Your Dishes from 10 Million Real Family Routines." The Neuron, 2025. ↩
- Zhao, T. Z. et al. "Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware." RSS 2023. ↩
- Chi, C. et al. "Diffusion Policy: Visuomotor Policy Learning via Action Diffusion." RSS 2023; IJRR 2024. ↩
- "Sunday Robotics Memo Humanoid Robot for Home." Mike Kalil, 2025.
- "Memo by Sunday Robotics: Price, Details, Review 2026." OriginOfBots. ↩
- Sunday Robotics Company Page
Improve this article
Add missing citations, update stale details, or suggest a clearer explanation. Every suggestion is reviewed for sourcing before it goes live.
6 revisions by 1 contributors · full history