TORA DoubleOne
Last edited
Fact-checked
In review queue
Sources
17 citations
Revision
v7 · 3,065 words
Fact-checks are independent of edits: a reviewer re-verifies the article against its sources and stamps the date. How we verify
| TORA DoubleOne | |
|---|---|
 | |
| General information | |
| Manufacturer | PaXini Technology |
| Country of origin | China |
| Year revealed | 2025 |
| Status | In production |
| Price | ~$45,000 USD |
| Availability | Preorder |
| Awards | iF Design Award 2025 |
| Website | paxini.com |
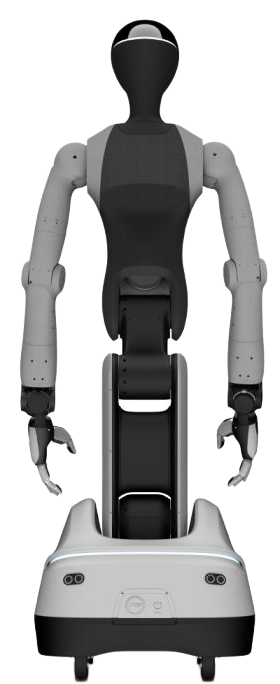
TORA DoubleOne (stylized as TORA-DOUBLE ONE) is a wheeled humanoid robot built around multi-dimensional tactile sensing and developed by PaXini Technology, a Shenzhen-based Chinese company that is China's largest tactile sensor manufacturer.[5] Priced at roughly $45,000, the general-purpose platform carries about 1,956 tactile sensors that generate more than 7,800 tactile channels, has 47 degrees of freedom, and pairs an articulated humanoid upper body with a stable wheeled base powered by the NVIDIA Jetson AGX Orin computing platform.[5][8] Positioned as a universal general-purpose platform for industrial and service applications, the TORA DoubleOne was first publicly demonstrated at iREX 2025 in Tokyo in December 2025 and subsequently showcased at CES 2026 in Las Vegas.[1][2]
Who makes the TORA DoubleOne?
PaXini Technology (Shenzhen) Co., Ltd. (Chinese: 帕西尼) was founded in 2021 by Xu Jincheng (also romanized as Hsu Jincheng), who studied under the renowned roboticist Shigeki Sugano at Waseda University in Tokyo. The Sugano Laboratory at Waseda is widely recognized as the birthplace of the world's first humanoid robot.[3] Although Sugano's lab encouraged researchers to pursue real-world applications, Xu was unable to find sufficient capital or opportunities in Japan. Lu Qi, the founder of the Chinese venture capital firm MiraclePlus and former COO of Baidu, spotted Xu's potential and became his angel investor. In April 2021, Xu relocated to Shenzhen and established PaXini within two months.[4]
The company has since grown into China's largest tactile sensor manufacturer and the only domestic company to produce multi-tactile dexterous robotic hands at commercial scale. Its product line covers the entire chain from core sensor components to complete humanoid robot systems. Thousands of companies across advanced manufacturing, high-end equipment, healthcare, and consumer electronics use PaXini's tactile sensing products.[5] According to Caixin, PaXini has driven the cost of a multi-dimensional tactile sensor down from around 100,000 yuan to as little as 199 yuan per unit, and the company has entered Apple's supply chain.[17]
Founder Xu Jincheng frames PaXini as an infrastructure provider rather than a sensor vendor. "What we're building is infrastructure for embodied intelligence," he said at CES 2026.[3] He has argued that sensors are only the entry point and that the truly scarce resource is high-quality tactile data, and he predicts that "a large number of robots will enter real production in 2-3 years."[10]
PaXini has attracted significant investment from major industrial and technology companies. In August 2025, JD.com led the company's Series A funding round, bringing the total capital raised to approximately CNY 1 billion (about $139 million USD) within just four months. Earlier backers include BYD, SAIC Motor, BAIC Group, TCL, and Addor Capital.[6] In March 2026, PaXini completed a Series B round of over 1 billion yuan (more than $145 million), pushing its valuation above 10 billion yuan (roughly $1.4 billion).[7][17] Announced on March 6, 2026, the round was co-led by Huangpu River Capital, Kaitai Capital, and the state-backed CIM International Group, with participation from 14 industrial and financial investors including Xin'an Capital and affiliates of Meta and JD.com.[17] This places PaXini among a small group of Chinese embodied intelligence firms valued above $1 billion and, by the company's account, makes it the highest-valued company globally in the embodied perception segment.[7]
Design and concept
The TORA DoubleOne was designed as a lightweight, general-purpose humanoid robot for professional deployment rather than laboratory research. Its core design philosophy prioritizes practical usability in real-world environments, with several key design decisions reflecting this focus.
Why does the TORA DoubleOne use wheels instead of legs?
Unlike bipedal humanoids such as the Tesla Optimus or Unitree H1, the TORA DoubleOne uses a wheeled base for locomotion. This approach trades the versatility of legged walking for enhanced stability, energy efficiency, and reliability on flat surfaces. The wheeled platform allows the robot to move through factories, warehouses, and commercial spaces without the risk of falls or the computational overhead of active balance control. The robot supports interchangeable chassis options, including a dual-steer AGV configuration and a four-wheel-drive (4WD) folding chassis, allowing operators to select the mobility platform best suited to their deployment environment.[8]
Foldable body
The TORA DoubleOne features a foldable torso and base design that collapses the robot into a compact form for transport and storage. This is a practical consideration for commercial deployments where robots may need to be moved between facilities or stored when not in use. The adjustable height ranges from 1.46 meters in the folded or lowered position to 1.86 meters at full extension, allowing the robot to interact with objects at different heights, from low shelves to standard countertops.[8]
Replaceable fabric skin
The exterior of the TORA DoubleOne uses quickly replaceable fabric coverings. Beneath the fabric, flexible tactile sensors are embedded to enable safe physical interaction with humans and to enhance the robot's ability to detect contact and holding forces. The fabric design also addresses hygiene concerns in service environments, since coverings can be swapped out and cleaned. This feature contributed to the robot winning the iF Design Award in 2025.[9]
VLA-driven intelligence
The robot is driven by a Vision-Language-Action (VLA) large model as its core intelligent engine. This system integrates visual perception, language understanding, and motion generation, allowing the robot to interpret its environment, follow instructions, and execute complex physical tasks autonomously. PaXini's proprietary OmniVTLA model extends this further by incorporating tactile data into the multimodal pipeline, creating what the company describes as a Vision-Tactile-Language-Action framework for comprehensive physical interaction.[10]
Technical specifications
| Category | Specification | Value |
|---|---|---|
| Physical | Height (adjustable) | 146 to 186 cm |
| Physical | Locomotion type | Wheeled (dual-steer AGV or 4WD folding chassis) |
| Degrees of freedom | Total DOF | 47 |
| Manipulation | Maximum payload capacity | 5 kg |
| Mobility | Maximum speed | 2 km/h (1.24 mph) |
| Mobility | Maximum slope | 8.5 degrees |
| Mobility | Obstacle clearance | 21.5 cm |
| Power | Battery type | Lithium-ion (swappable) |
| Power | Battery capacity | 40 Ah |
| Power | Operating time | Up to 8 hours |
| Power | Charging time | 6 hours |
| Sensors | Tactile sensors | ~1,956 multi-dimensional sensors, 7,800+ tactile channels |
| Sensors | Visual cameras | 5 HD monocular cameras + 2 depth cameras |
| Sensors | 3D sensing | LiDAR with laser SLAM |
| Sensors | Wide-angle | Fisheye camera |
| Sensors | Audio | Circular microphone arrays |
| Computing | AI platform | NVIDIA Jetson AGX Orin + x86 controller |
| Computing | AI model | OmniVTLA (Vision-Tactile-Language-Action) |
| Autonomy | Decision-making | Fully autonomous |
| Connectivity | Interfaces | Wi-Fi, Bluetooth, 5G |
| Safety | Exterior material | Replaceable textile with embedded tactile sensors |
How does the TORA DoubleOne sense its environment?
Perception is a central strength of the TORA DoubleOne, reflecting PaXini's origins as a tactile sensing company. The robot integrates multiple sensing modalities to build a comprehensive understanding of its environment.
Tactile sensing
The TORA DoubleOne incorporates approximately 1,956 high-precision multi-dimensional tactile sensors distributed across its body and hands, generating over 7,800 tactile channels. These sensors are based on PaXini's proprietary 6D Hall array technology, which uses arrays of Hall-effect sensors to capture multi-axis pressure and force vectors with high spatial density. Each sensor can detect up to 15 tactile dimensions, including six-axis force (three translational and three rotational axes), surface texture, material elasticity, friction, softness, and temperature. Force sensing resolution reaches 0.01 newtons across the full measurement range, with repeatability below 0.5% of full scale and a sampling rate of 1,000 Hz.[5][11]
The robot's touch hardware builds on PaXini's PX-6AX-GEN3 tactile sensor line, the third generation of the company's flagship sensor, which spans three product series and 12 models and can sample at several million times per second while outputting 15 categories of tactile information at 1,000 Hz.[2][11] PaXini describes its companion PX6D six-axis force and torque sensor as "the world's first commercial Hall-effect 6D force/torque sensor designed for embodied AI."[2]
This tactile capability allows the robot to perceive subtle physical properties during manipulation tasks, such as detecting whether an object is slipping, determining the softness of a material, or adjusting grip force in real time to avoid damaging fragile items.
Visual and spatial perception
The robot is equipped with five high-definition monocular cameras and two depth cameras for visual perception. Combined with LiDAR and laser-based SLAM (Simultaneous Localization and Mapping), these sensors provide full 360-degree environmental awareness and autonomous navigation capabilities. A fisheye camera adds wide-angle coverage for peripheral awareness, while circular microphone arrays enable directional audio perception and voice interaction.[8][12]
Intelligent Tactile Processing Units (ITPUs)
At the core of PaXini's sensing architecture are the Intelligent Tactile Processing Units (ITPUs), custom-designed processors that handle real-time fusion and interpretation of tactile signals. Rather than sending raw sensor data to the main computing platform, ITPUs perform local processing to generate dynamic force maps and trigger adaptive control responses. This distributed approach reduces latency and enables the robot to react to physical contact in real time without relying on cloud connectivity.[5]
Dexterous manipulation
The TORA DoubleOne's manipulation capabilities are built around PaXini's dexterous hand technology. While the robot platform itself supports modular end-effectors, its primary configuration uses bionic hands designed for human-like grasping and fine manipulation.
DexH13 dexterous hand
PaXini's flagship dexterous hand, the DexH13, is described by the company as the world's first dual-modal robotic end-effector integrating multi-dimensional tactile sensing with AI vision. Each DexH13 hand integrates 1,140 ITPU multi-dimensional tactile sensing units and is equipped with an 8-megapixel high-definition AI hand-eye camera using a zero-sample pose estimation vision algorithm. The hand has 16 degrees of freedom and a four-finger design, with a 5 kg load capacity. It produces 3,420 multi-dimensional signals during operation and is rated for durability exceeding 100,000 operational cycles.[13]
At CES 2026, the DexH13 demonstrated accurate mirroring of a wide range of human hand gestures, stable grasping of irregular objects including test tubes, cubes, and delicate items, and fine manipulation tasks such as turning knobs.[2]
Relationship to TORA-ONE
The TORA DoubleOne shares its tactile sensing platform with PaXini's other humanoid robot, the TORA-ONE. While TORA-ONE has 53 degrees of freedom (compared to the DoubleOne's 47) and focuses on fine manipulation demonstrations such as autonomous ice cream preparation, the DoubleOne emphasizes mobility, obstacle navigation, and dynamic physical interaction. The TORA-ONE uses the second-generation DexH13 GEN2 dexterous hand, while the DoubleOne's hand configuration is modular and can be adapted to different task requirements. Both robots share PaXini's core tactile sensor technology and the OmniVTLA AI model.[1][3]
What AI model powers the TORA DoubleOne?
The TORA DoubleOne runs on a dual-processor computing architecture combining an NVIDIA Jetson AGX Orin module for AI inference with an x86-based controller for general system management. The AGX Orin handles the computationally intensive tasks of real-time perception, sensor fusion, and autonomous decision-making, while the x86 controller manages communication, system diagnostics, and lower-level motor control.
The robot's intelligence is powered by PaXini's OmniVTLA model, a multimodal AI system that fuses visual, tactile, linguistic, and action data into a unified perception and planning framework. This model was trained using data from PaXini's Super EID Factory, a 12,000-square-meter embodied intelligence data facility in Tianjin that generates approximately 200 million omni-modal data entries annually. The facility uses over 150 standardized data acquisition units across more than 15 application scenarios, with human operators wearing motion capture equipment to generate training data through natural movements rather than traditional teleoperation.[10][14]
PaXini makes its training data available to global partners through the OmniSharing DB platform, which the company describes as the world's first embodied intelligence data cloud marketplace.[14]
Where has the TORA DoubleOne been shown publicly?
iREX 2025 (Tokyo)
The TORA DoubleOne made its international debut at the International Robot Exhibition (iREX) 2025, held December 3 to 6, 2025, in Tokyo, Japan. At the event, the robot demonstrated, in PaXini's words, "stable obstacle-crossing by smoothly navigating steps," highlighting both its agility and robustness. The demonstration showed the robot's adaptability to complex indoor and outdoor terrains. Alongside it, the TORA-ONE performed a complete ice cream preparation workflow, autonomously handling levers, ingredients, and cup delivery.[1]
CES 2026 (Las Vegas)
At CES 2026, held January 6 to 9, 2026, PaXini showcased the TORA DoubleOne at Booth 9153 in the Enterprise AI Zone of the North Hall of the Las Vegas Convention Center. The robot greeted visitors at the booth entrance, demonstrated advanced motion control by completing complex obstacle-crossing tasks, and engaged in physical interactions including handshakes with attendees. These demonstrations highlighted the robot's ability to respond to physical contact and maintain stable operation during dynamic interactions.[2]
CES 2026 was also notable for PaXini's broader product showcase, which included an exact replica of the company's Omni-Modality Embodied AI Data Acquisition System and live demonstrations of the DexH13 dexterous hand and PX-6AX-GEN3 tactile sensors.[2]
What is the TORA DoubleOne used for?
PaXini positions the TORA DoubleOne for deployment across multiple professional sectors rather than consumer or domestic use:
- Logistics and warehousing: The wheeled platform and manipulation capabilities make the robot suitable for parcel sorting, shelf handling, inventory management, and material transport in warehouse environments. PaXini has tested its robots in logistics warehouses and automotive manufacturing facilities.[3][8]
- Manufacturing: In factory settings, the robot can assist with assembly line tasks, quality inspection, and material handling where its tactile sensing provides advantages for handling fragile or irregularly shaped components.
- Healthcare: The robot's safe interaction capabilities, enabled by its flexible tactile skin and force-controlled movements, make it suitable for healthcare support tasks such as delivering supplies or assisting caregivers.
- Hospitality and food service: Building on the ice cream demonstrations at CES and iREX, the platform can be configured for food preparation, serving, and customer interaction in commercial food service environments.
- Retail and commercial spaces: The robot can serve as an interactive greeter, information kiosk, or customer service assistant in retail environments, with its handshake capability and audio perception enabling natural visitor engagement.
Competitive landscape
The TORA DoubleOne operates in the growing market for wheeled humanoid robots, which represented approximately 70.2% of the total humanoid robot market in 2023, according to industry reports.[15] Its primary competitors include other Chinese humanoid platforms such as the Agibot series, Unitree robots, and UBTECH Walker models, as well as international competitors like Agility Robotics Digit and the Figure 02.
However, PaXini differentiates itself through its deep expertise in tactile sensing technology. While most humanoid robot makers rely on visual perception as their primary sensing modality, PaXini's approach centers on tactile perception as the foundation for manipulation and interaction. PaXini describes its TORA robots as among the first humanoid systems in the embodied AI industry to be built around multi-dimensional tactile sensing rather than vision alone.[11] The company's ability to produce both the sensors and the robots that use them, combined with its proprietary data infrastructure, gives it a vertically integrated advantage that few competitors can match.[3]
China's humanoid robot industry has grown rapidly, with the country producing nearly 100 embodied AI robotic products since 2024 and capturing an estimated 70% of the global market. PaXini's focus on the "full-stack infrastructure" approach, combining sensors, data, models, and robot bodies into a single deployable system, positions it as a platform provider rather than just a robot manufacturer.[3][16]
How does the TORA DoubleOne compare to the TORA-ONE?
| Feature | TORA DoubleOne | TORA-ONE |
|---|---|---|
| Total degrees of freedom | 47 | 53 |
| Height range | 146 to 186 cm | 146 to 186 cm |
| Locomotion | Wheeled (AGV/4WD chassis) | Wheeled |
| Maximum speed | 2 km/h | 25 km/h |
| Maximum payload | 5 kg | 6 to 10 kg |
| Battery life | 8 hours | 8 hours |
| Primary focus | Mobility, obstacle navigation, dynamic interaction | Fine manipulation, tactile dexterity |
| Design emphasis | General-purpose, lightweight, foldable | Multi-dimensional tactile perception |
| Hand configuration | Modular (compatible with DexH13) | DexH13 GEN2 (4-finger, 26 DOF hands) |
| Status | In production / preorder | Prototype |
| Approximate price | $45,000 USD | $100,000 USD |
See also
- Humanoid robot
- PaXini Technology
- TORA-ONE
- Embodied AI
- Humanoid robot hands
- Dexterous hand
- Tactile sensing
- Degrees of freedom
- LiDAR
- NVIDIA Jetson
References
- Chinese Robotics Company PaXini Shines at iREX 2025, Demonstrating Top-Tier Global Embodied Intelligence Strength - PR Newswire ↩
- PaXini Unveils the "Tactile Infrastructure" for Embodied AI, Redefining Full-Stack Product Matrix at CES 2026 - PR Newswire ↩
- At CES 2026, PaXini lays out a "full-stack" roadmap for embodied intelligence - KrASIA ↩
- Why Is the Taiwanese Robot Master from Waseda University Moving to China? - CommonWealth Magazine ↩
- China's young engineers advance tactile tech for dexterous robot hand - CGTN ↩
- JD.Com Doubles Down on Robotics by Leading Investment in Startup PaXini - Yicai Global ↩
- PaXini Tech Secures Over $150 Million Series B Financing, Valuation Surpasses $1.5 Billion - Pandaily ↩
- Paxini Tora Double One Universal Humanoid Robot - Robotic Gizmos ↩
- iF Design Award 2025 - Double One - iF Design ↩
- 36Kr Global Exhibition: On-site at CES 2026 - PaXini Aims to Build "Physical Perception Infrastructure" for Embodied Intelligence Beyond Sensors - 36Kr ↩
- PaXini to Debut at CES 2026, Advancing Embodied AI Infrastructure Through Tactile Sensing - PR Newswire ↩
- Paxini Tora Double One specifications - RobGen ↩
- PaXini DexH13 - Advanced Tactile and Vision Robotic Hand - Humanoid.guide ↩
- World's largest embodied AI data factory opens in Tianjin - ECNS ↩
- Humanoid Robots Global Market Report 2026-2040 - GlobeNewsWire ↩
- China's ice cream-making humanoid robot wows crowds at US tech show - Interesting Engineering ↩
- Robot Sensor Startup PaXini Raises $145 Million, Tops $1.4 Billion Valuation - Caixin Global ↩
Improve this article
Add missing citations, update stale details, or suggest a clearer explanation. Every suggestion is reviewed for sourcing before it goes live.
6 revisions by 1 contributors · full history